

Autores: Mauro Montoya Arenas
Leonel Breña Dávila
Profesor: Jean Carlos Mallca
Sintonización de controladores PID
Resumen: En el presente informe se analizó técnicas clásicas de sintonización de controladores PID como los son el método de Ziegler and Nichols y el controlador de por modelo interno. Además, se buscó la optimización de estos haciendo variaciones intuitivas con criterio para asegurar que los ajustes finos realizados son en pro de obtener una respuesta con parámetros aceptables. En la primera sección del informe se hizo uso del primer método de Z y N a un sistema aproximando a este a un modelo de primer orden con retardo y finalmente su buscó una optimización en la respuesta del sistema en lazo cerrado. En la segunda sección, se realizó la sintonización mediante IMC. Luego se varió la constante de tiempo para análisis de su efecto en el sistema. Finalmente, se realizó una simulación considerando perturbación en el sistema y se comparó la eficacia del método del IMC con el de ZyN.
INTRODUCCION
Los controladores PID tienen múltiples funciones y puede llevar a cabo el control de numerosos sistemas que van desde el control de una temperatura concreta hasta el de una dirección de un dispositivo móvil o, por ejemplo, el control de velocidad de un sistema automático. La primera ventaja del uso de reguladores PID es que con ellos podemos disminuir el tiempo de respuesta y hacer que esta sea mucho más rápida. Junto con la rapidez, también es posible configurar reguladores PID para conseguir de ellos una respuesta precisa, es decir que en determinadas ocasiones deberemos priorizar la precisión antes de la rapidez de respuesta del sistema.
Hay varias formas de sintonizar un controlador PID. Existen software diseñados para esto, como lo es el Simulink, los cuales estiman las dinámicas del proceso por la respuesta obtenida ante la variación de la referencia. Otros métodos están basados en la teoría de control, como por ejemplo el de Zieglers y Nichols. Estos métodos son una buena alternativa, pero en ocasiones requieren llevar al proceso a condiciones que en la práctica son perjudiciales o simplemente no son posibles, como hacer que el sistema se haga oscilatorio [2].
Otra técnica de un gran rendimiento es el controlador por modelo interno (IMC). El IMC ha sido mostrado como una estrategia de control con buenos resultados, gracias a su robustez, contra los efectos ocasionados por los disturbios y la inexactitud que presenta el modelo introducido con respecto al real [3].
MARCO TEORICO
Método de Ziegler y Nichols
Cuando pensamos en las ventajas de aplicar el método de sintonización propuesto por Ziegler y Nichols, la que posiblemente será más atractiva es que no hay necesidad de conocer la función de transferencia del sistema, ya que con conocer la respuesta de forma empírica y tener criterio para seleccionar una metodología adecuada para sintonización es suficiente para obtener un controlador con características aceptables en muchos casos.
Primer método:
El primer método se basa en un análisis de la respuesta de forma experimental para luego realizar el proceso de sintonización. Si la planta no contiene integradores ni polos dominantes complejos conjugados, la curva de respuesta escalón unitario puede tener forma de S, como se observa en la Figura 1. Este método se puede aplicar si la respuesta muestra una curva con forma de S [1]. Los parámetros de interés se obtendrán trazando una recta tangente en el punto de inflexión de la respuesta del sistema como se ve a continuación.
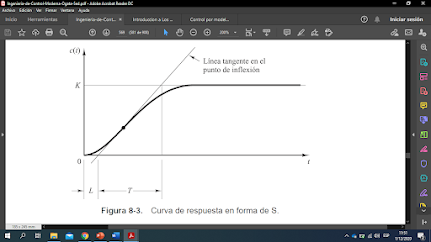
Figura 1. Recta tangente en la respuesta del sistema
Los parámetros por obtener son el tiempo de retardo (L) y la contante de tiempo T. Debemos tener en cuenta que en este primer método de ZyN aproximaremos el sistema a un sistema de primer orden con retardo.
C(s)U(s)=Ke-LsTs+1 (1)
Con los parámetros obtenidos, podemos realizar la sintonización dependiendo de qué tipo de controlador se adaptará mejor a nuestro sistema. Con frecuencia, un controlador PI es más que suficiente para nuestro sistema y el querer adicionar un término derivativo puede ser más perjudicial que benéfico para nuestro sistema.
Tabla 1
El resultado de controlador PID mediante este primer método es el siguiente
Gcs=Kp1+1Tis+Tds (2)
=1.2TL1+12Ls+0.5Ls (3)
=0.6Ts+1L2s (4)
Podemos concluir que el controlador tiene un polo en el origen y un cero doble en s=-1/L.
Segundo método:
El segundo método consiste en básicamente variar el término proporcional Kp del controlador hasta llevar al sistema a su límite de estabilidad considerando Ti=∞ y Td=0 y a partir de esto, realizar una sintonización. La respuesta del sistema al límite de su estabilidad será como la siguiente.

Figura 2. Sistema llevado a su estabilidad marginal
De la figura anterior obtendremos 2 parámetros: Kcr y Pcr los cuales representan la ganancia crítica y el periodo de oscilación respectivamente.
Para este método, Ziegler and Nichols propusieron los siguientes valores para el tipo de controlador que deseemos implementar.
Tabla 2
Método del controlador por modelo interno (IMC)
La estructura de Modelo Interno de Control (IMC) propuesta inicialmente por los investigadores Morari y Zafiriou en los años 80, por lo que podemos decir que no es una metodología reciente.
Está conformada por un controlador y un modelo del proceso real como veremos en la figura 3, en ocasiones llamado IM (Internal Model) representado por la zona punteada de la figura 3. La referencia [3] no dice que esta estructura de control se basa en el principio del IM donde el estado deseado de la variable controlada puede ser alcanzado si el sistema de control encapsula, ya sea implícita o explícitamente alguna representación del proceso a ser controlado.
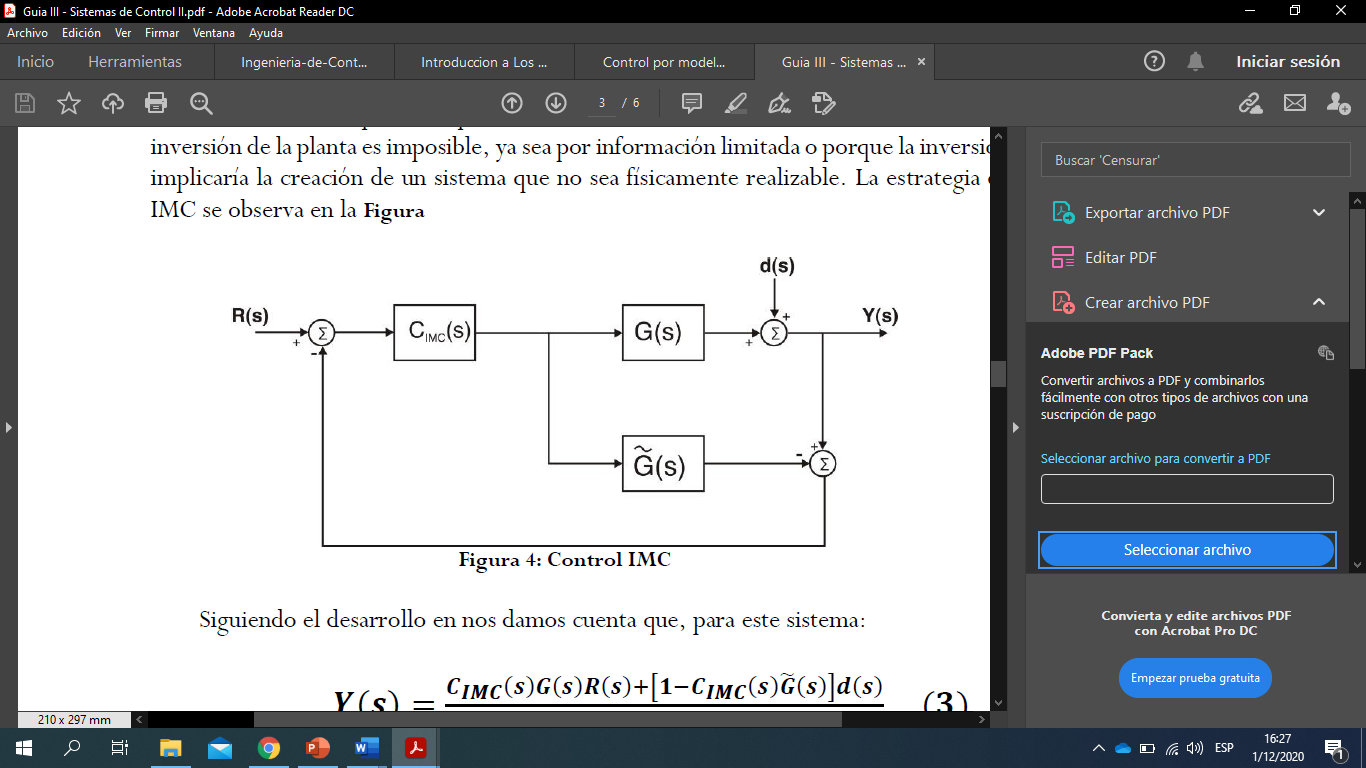
Figura 3. Controlador por modelo interno
Esto quiere decir que se implementará un modelo exacto del sistema real, un control perfecto sobre la variable controlada. La realimentación consistirá en la diferencia que hay entre la señal del modelo “perfecto” del IM y la salida del proceso real.
Si fuese un caso ideal podríamos hacer un control perfecto haciendo
CIMC=Gs-1 y Gs=Gs (5)
Esto no es posible ya que Gs puede incluir una parte no invertible como ceros en fase no mínima y/o retardos puros.
Lo conveniente es dividir el modelo interno en una parte que se pueda invertir y otra que no de la siguiente manera
Gs=G+sG-s (6)
Adicionalmente, para atenuar errores de modelado se suele utilizar un filtro Gfs debido a diferencias entre el proceso y el modelo del proceso.
Gfs=1(1+tfs)n (7)
Este filtro será parte del controlador ayudando a que CIMC sea propia, ya que irá en serie con el controlador. De forma práctica podemos hacer que n sea igual a 1 mientras que el valor de f se tomará como la mitad de , para que el filtro sea más rápido que la dinámica del proceso.
El controlador finalmente sería de la siguiente manera
CIMC=G+s-1Gfs (8)
Aplicación del IMC para la sintonización para la sintonización de Controladores PID
Si nuestro proceso puede ser representado por un modelo de primer orden con retardo. Y a este retardo se le aplica la aproximación de Padé. Entonces, a partir de la estrategia de control IMC se podría hallar una sintonía para controladores PID. Veámoslo en el siguiente ejemplo:

Figura 4. Controlador por Modelo Interno.
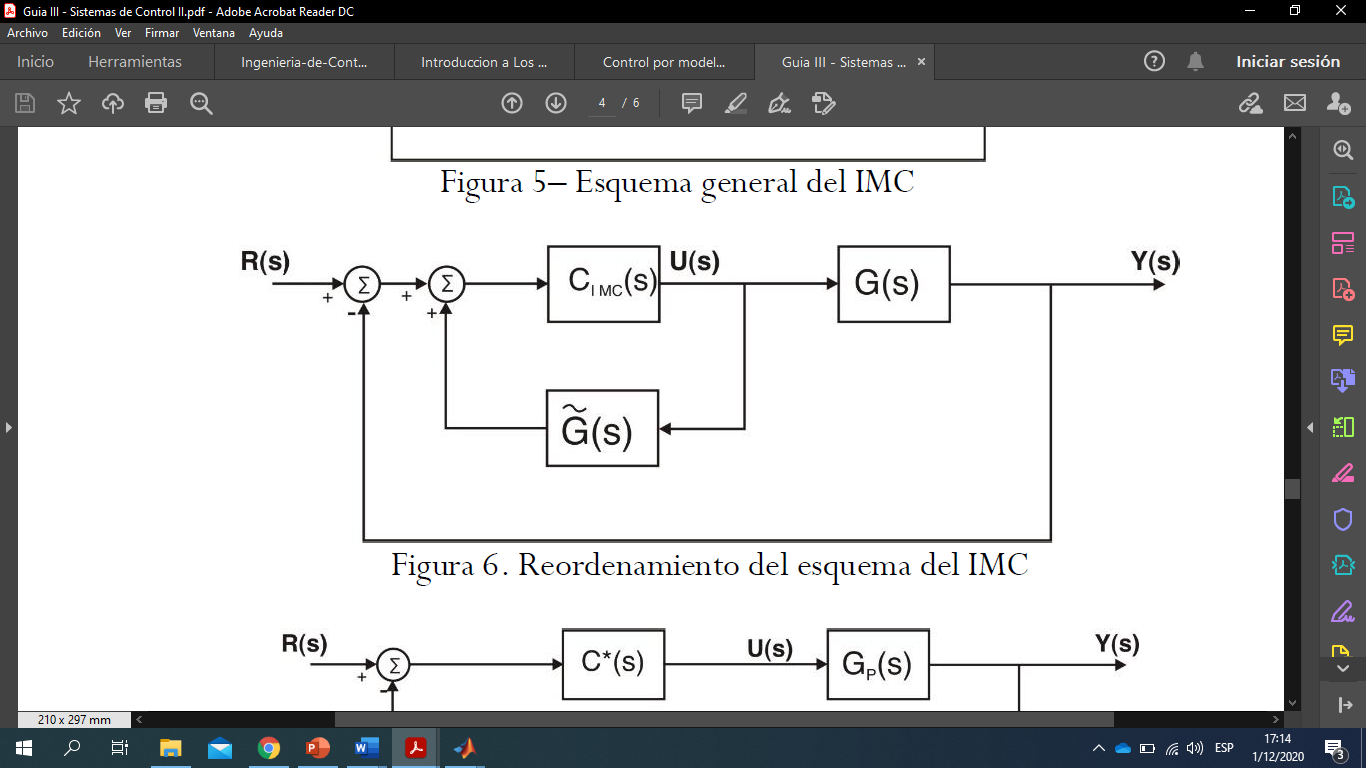
Figura 5. Reordenando el sistema

Figura 6. Lazo cerrado
C*s=CIMC(s)1-CIMC(s)G(s)=G+s-1Gf(s)1-G-(s)Gf(s) (9)
Si el modelo del proceso viene dado como un modelo de primer orden con retardo, es decir:
G=ke-tmsτs+1 (10)
De (10) tenemos:
G+=kτs+1 (11)
G-=e-tms (12)
Reemplazamos el término del retardo por su aproximación de Padé en la ecuación (12), obtenemos
G-=e-tms1-tm2s1+tm2s (13)
Reemplazando las ecuaciones 10, 11 y 13 en la ecuación 6.
GPIDs=G+s-1Gfs1-G-sGfs=(1+τs)(1+tm2s)kf+tm2s (14)
Teniendo en cuenta la función de transferencia del controlador PID ideal:
GPIDs=KP1+1Tis+sTd (15)
Comparando las ecuaciones 11 y 12 obtenemos los parámetros KP , Ti y Td, los cuales se muestran en la siguiente tabla
Tabla 3
MATERIALES Y METODOS
ESQUEMAS
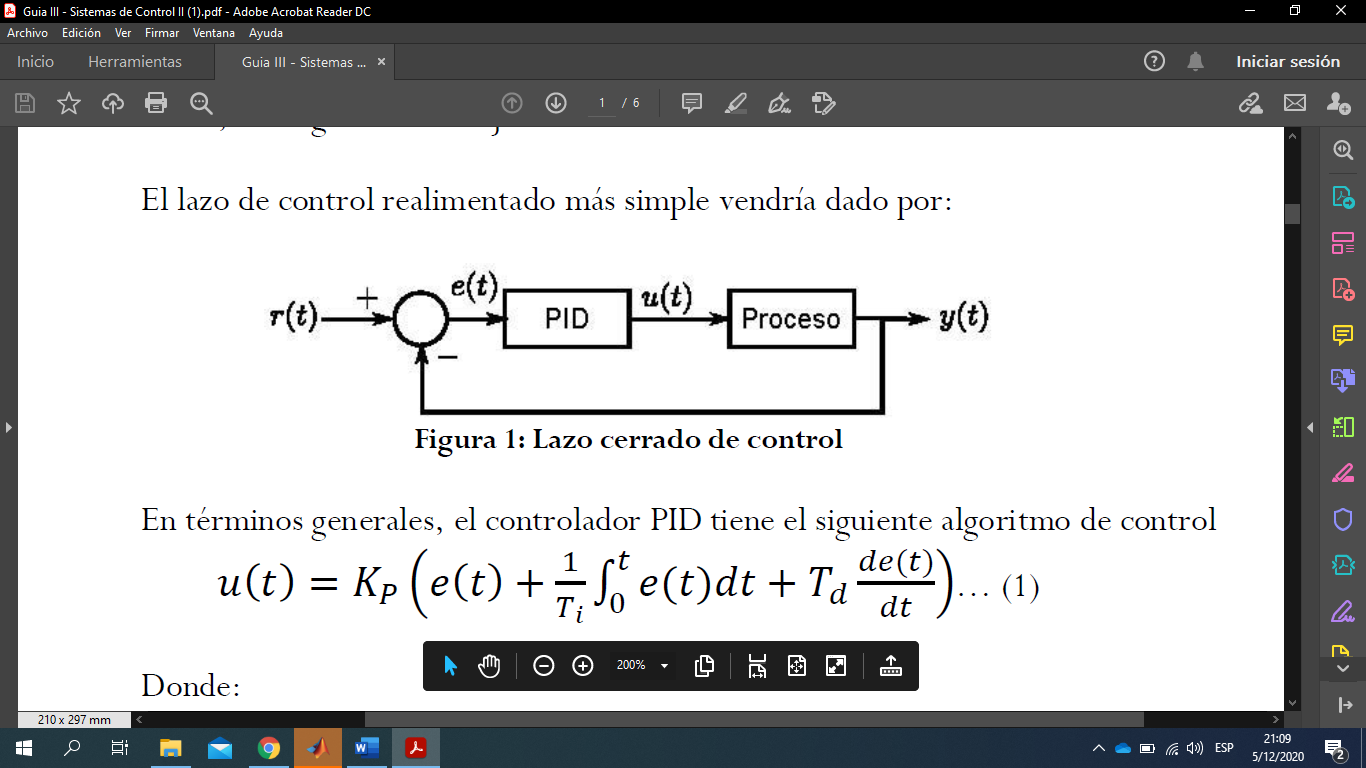
Figura 7. Lazo cerrado de control.
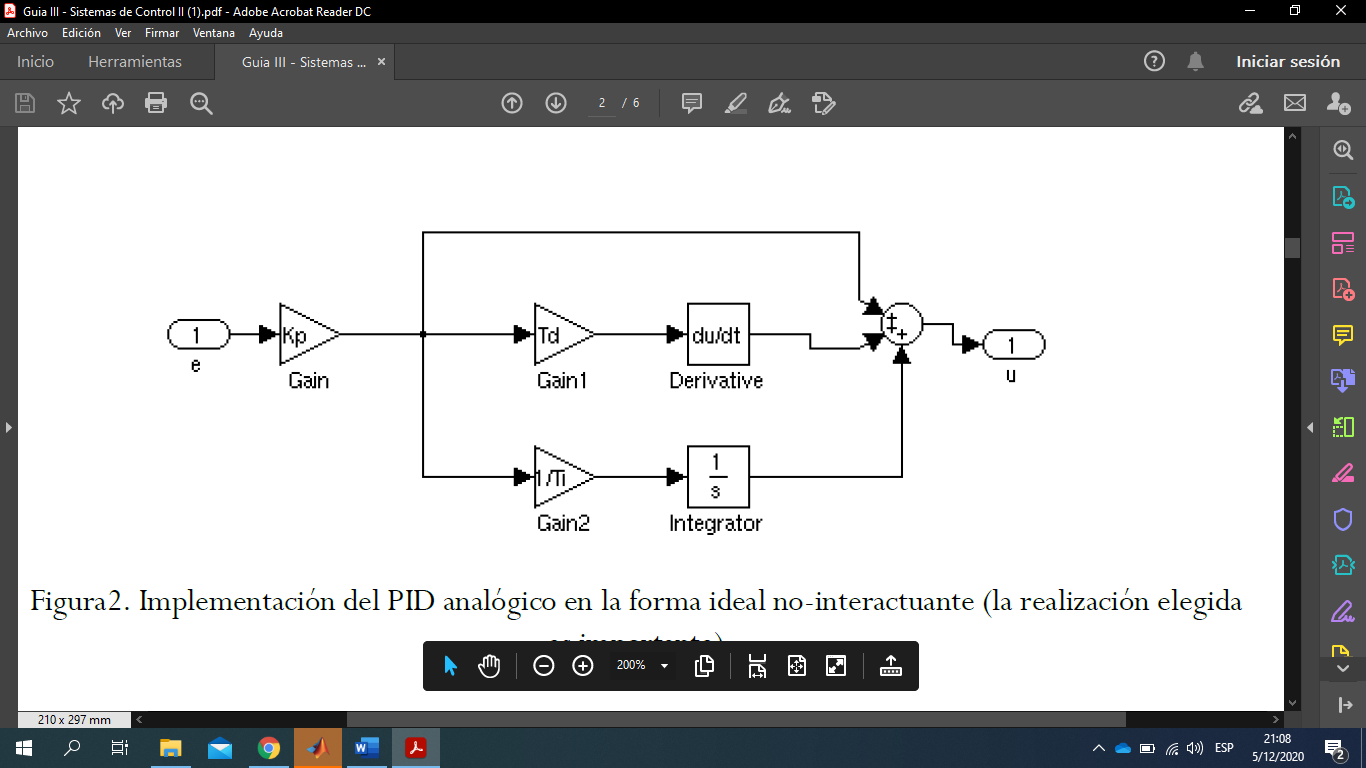
Figura 8. Implementación del PID
PROCEDIMIENTO
En Matlab/Simulink halle la respuesta de nuestro proceso:
Gs=10(0.1s+1)(0.05s+1)2 (16)
Este apartado se realizó haciendo uso de un script de Matlab donde mostramos solamente la respuesta del sistema ante una entrada tipo escalón unitario.

Figura 9. Script para graficar la función G(s)

Figura 10. Respuesta ante un entrada tipo escalón unitario
De la ecuación 16 sabemos que se trata de un sistema de tercer orden Observamos que la figura 10 nos muestra una respuesta sin sobre-impulsos, cosa que no fue ninguna sorpresa ya que los polos del sistema son los siguientes:
p1=-10 p2,3=-20 (17)
Ya que ubicamos los polos en el semiplano izquierdo y notando que no contiene parte imaginaria, el sistema no tendrá una respuesta con oscilaciones.
En Matlab/Simulink programe el lazo de control realimentado de la figura 1 considerando la ley de control del controlador PID según con la ecuación 1.
Codificando en Matlab podemos definir el controlador PID y hacerlo parte del sistema y crear la retroalimentación respectiva como se ve a continuación
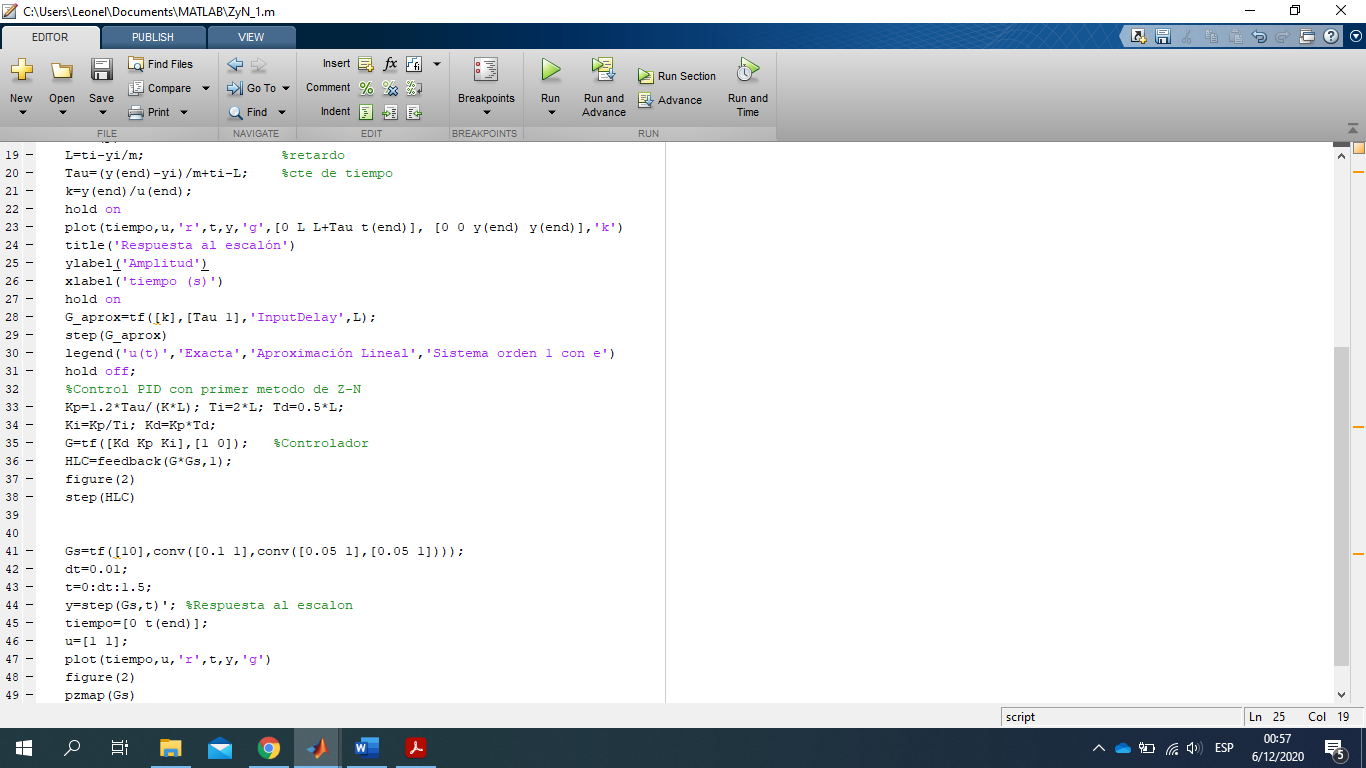
Figura 11. Programación de controlador PID
Entonces, el sistema controlado queda definido con la siguiente instrucción:
HLC=feedback(G*Gs,1);
Donde Gs es la función de transferencia del sistema original de la ecuación 14 y G es el controlador PID.
Haciendo la implementación en Simulink del controlador PID como en la figura 8 (ideal)
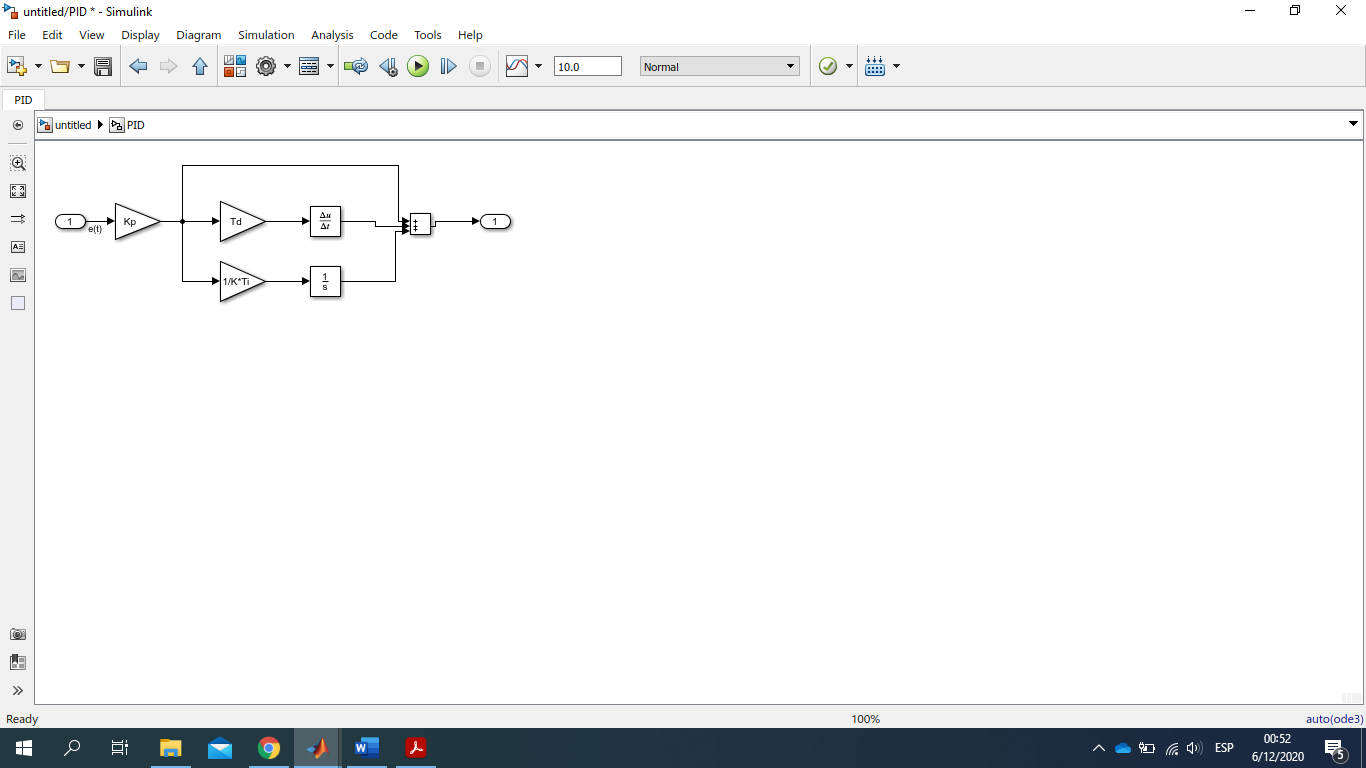
Figura 12. Implementación de subsistema (Controlador PID)
Almacenándolo en un subsistema y uniendo este controlador a la función de transferencia del sistema obtenemos lo siguiente

Figura 13. Sistema controlador
Sintonización del controlador PID
I. Método de Ziegler-Nichols
Con el modelo de primer orden con tiempo muerto de nuestro proceso, encuentre los parámetros del controlador PID usando el método de Ziegler-Nichols.
Primero, precisamos que, tras el análisis hecho en el primer apartado del procedimiento, observamos que el sistema no contiene oscilaciones en su respuesta y por ende, tampoco contiene sobre-impulso. Asemejándose así a un sistema de primer orden sobreamortiguado excepto por la concavidad que podemos ver al inicio de la respuesta transitoria. Dejando claro las observaciones anteriores, podemos decir que el sistema se puede aproximar a un sistema de primer orden con retardo que tendrá la forma mostrada en la ecuación 1.
Ahora, teniendo en cuenta el análisis hecho y las ecuaciones para el controlador PID de la tabla 1 y la ecuación 2, implementamos un script capaz de obtener los valores de 𝐾𝑃, 𝑇𝑖 y 𝑇𝑑.

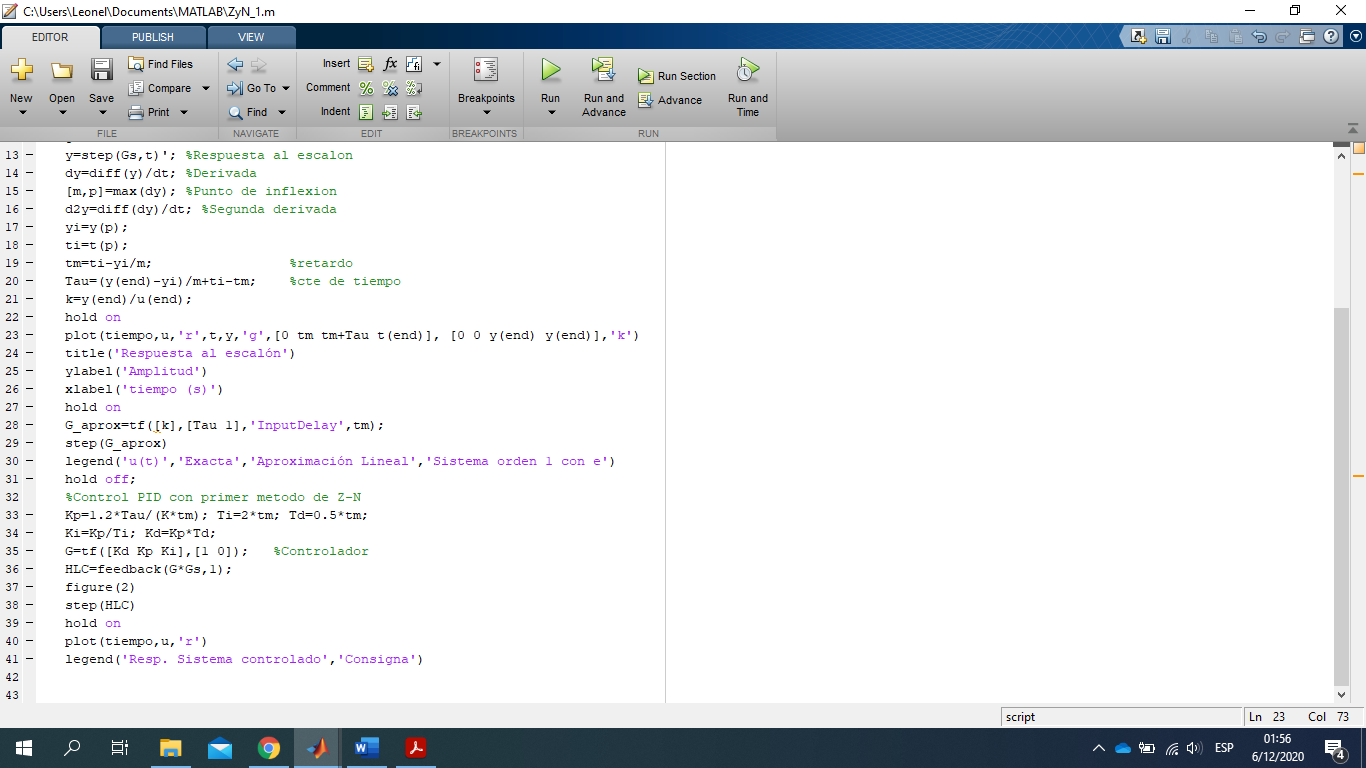
Figura 14. Código fuente
De forma adicional a lo pedido, veremos la gráfica conjunta del sistema original, la entrada de excitación, el sistema de primer orden con retardo aproximado con la recta tangente que pasa por el punto de inflexión.
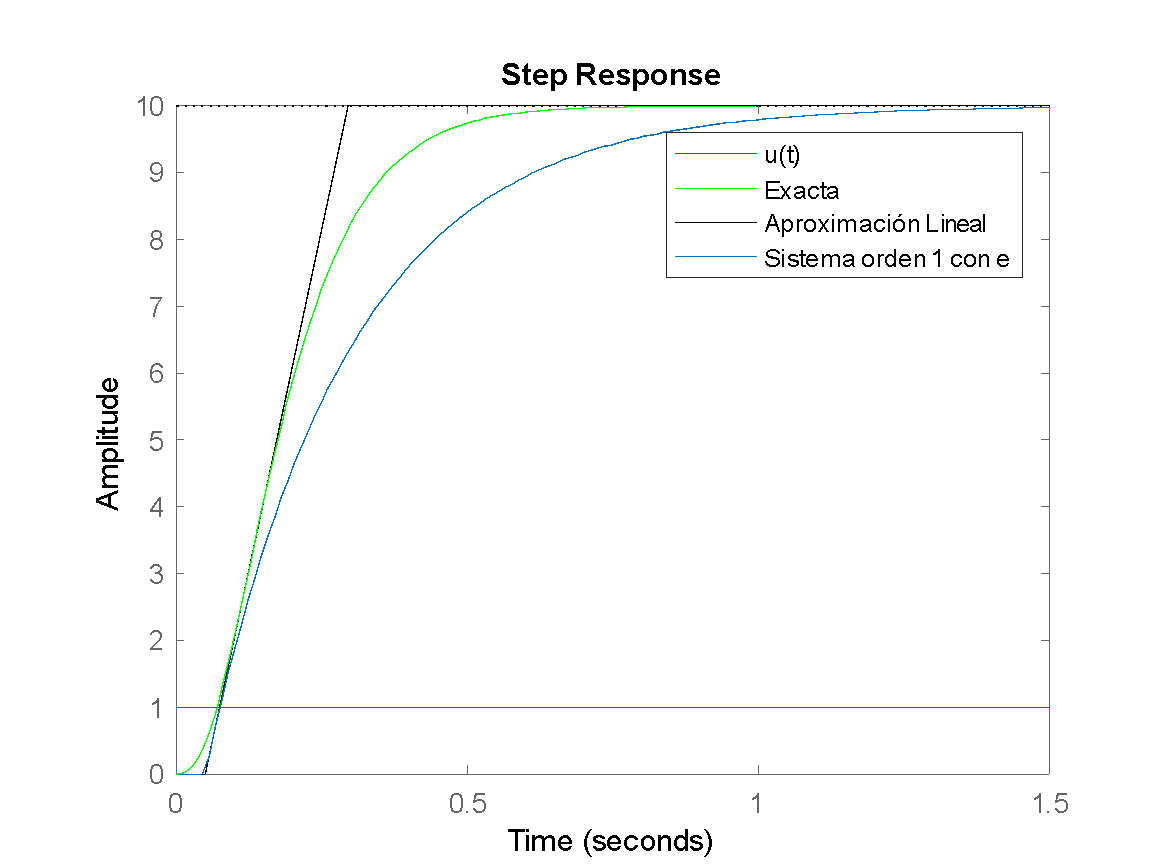
Figura 15. Gráfica conjunta de respuestas más la recta tangente
De esta forma se puede comprender de forma integral el procedimiento posterior de este método ya que podemos estimar de forma empírica los valores de las constantes que serán obtenidas posteriormente.
Del código de la figura 14 obtuvimos los valores de 𝐾𝑃, 𝑇𝑖 y 𝑇𝑑.
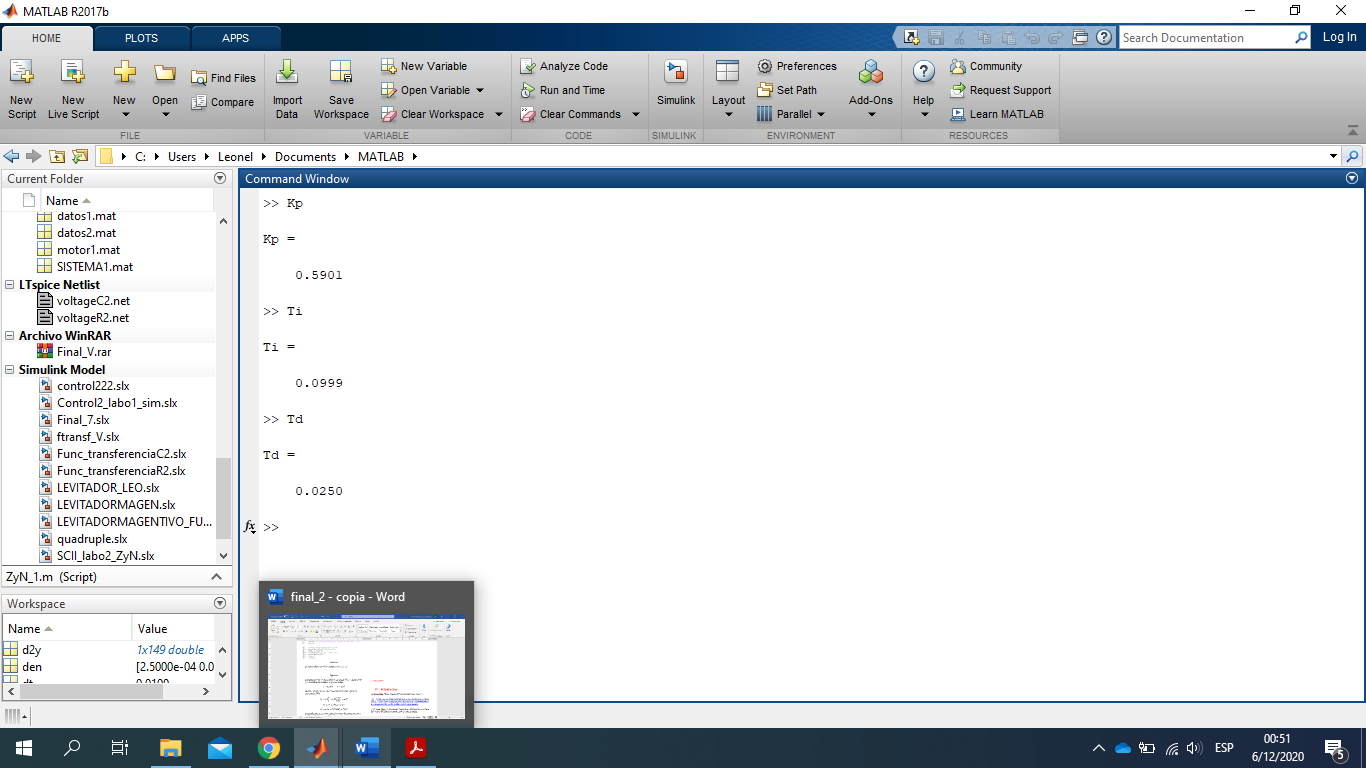
Figura 16. Valor Kp, Ti y Td obtenidos de MATLAB
Corroborando de forma analítica, partimos de los valores de T y L obtenidos del modelo de primer orden
T=0.2457 L=0.05 (18)
De estos valores en las equivalencias de la tabla 1 para un controlador PID
Kp=1.2T10tm=1.20.24570.5=0.589 (19)
Ti=2tm=20.05=0.1 (20)
Td=0.5tm=0.50.05=0.025 (21)
Comprobamos la correcta obtención tanto de forma manual y con herramientas computacionales.
Realice una simulación del comportamiento del sistema de control ante un cambio en la consigna (escalón unitario) usando la sintonía obtenida.
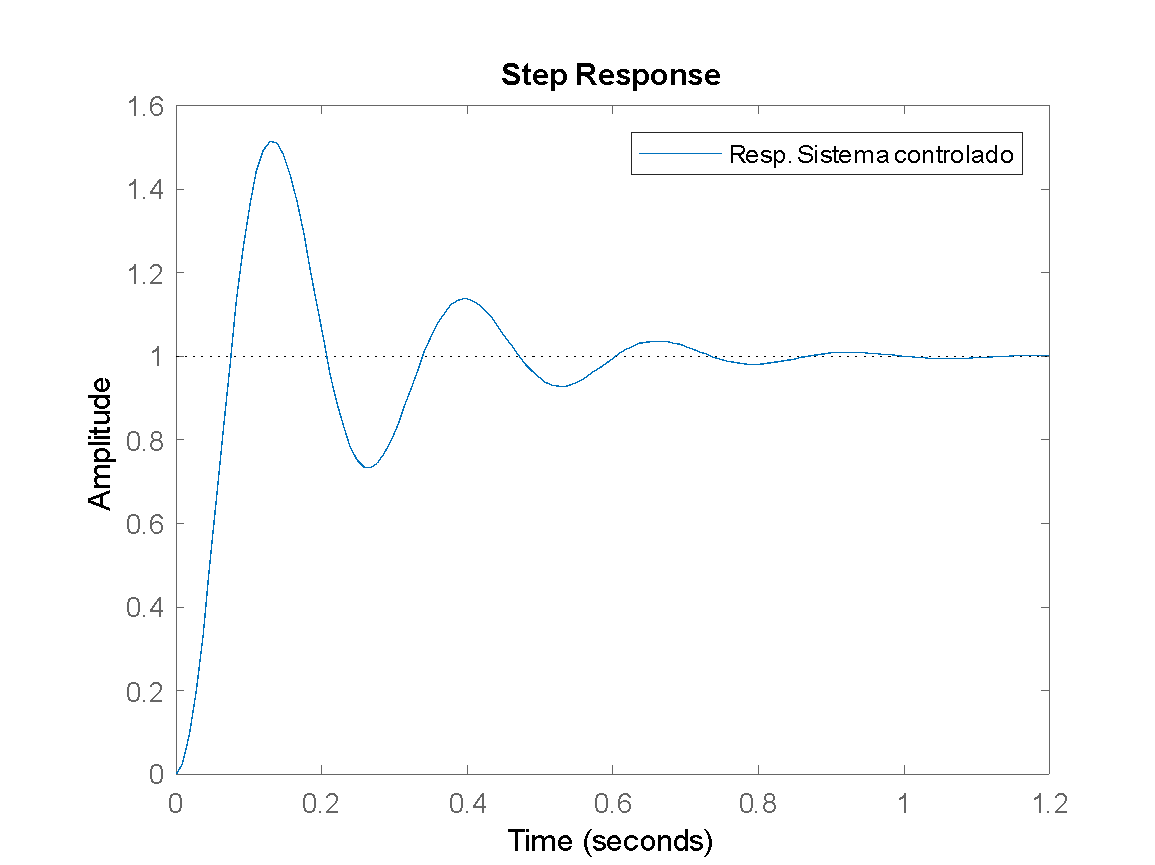
Figura 17. Respuesta del sistema controlado ante un escalón unitario
Ahora, haremos un cambio en el valor del escalón para ver la efectividad de nuestro controlador.
El cambio de consigna será ahora un step de magnitud 5 como se ve en la siguiente gráfica

Figura 18. Respuesta del sistema controlado ante un escalón valor 5
Vemos que el controlador cumple su rol fundamental de llevar al sistema al valor de la consigna en estado estacionario.
Ahora, haciendo la implementación en Simulink tenemos lo siguiente
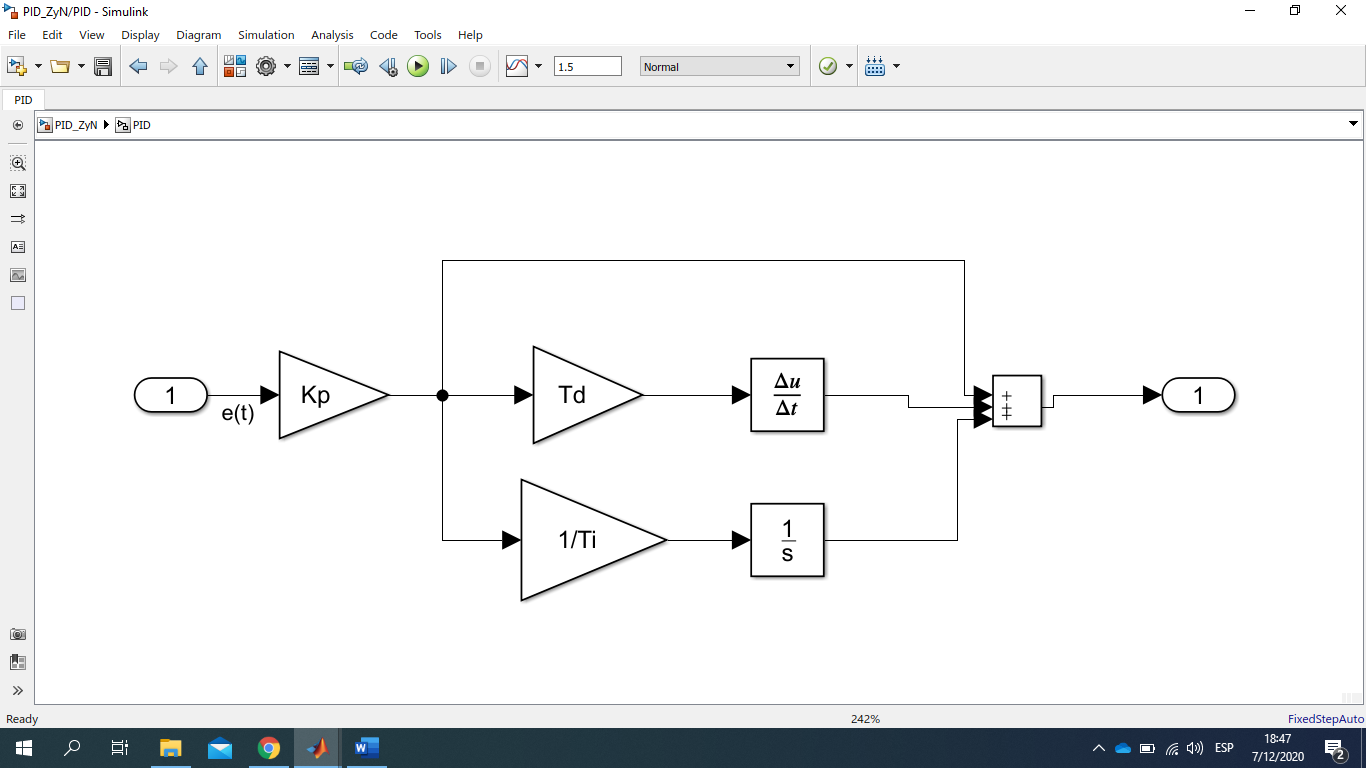
Figura 19. Asignación de variables al controlador.
Veamos que se ingresaron los valores como variables que ya han sido declaradas en el workspace, como evidencia de ello estarán disponibles los archivos de simulación en el archivo comprimido.
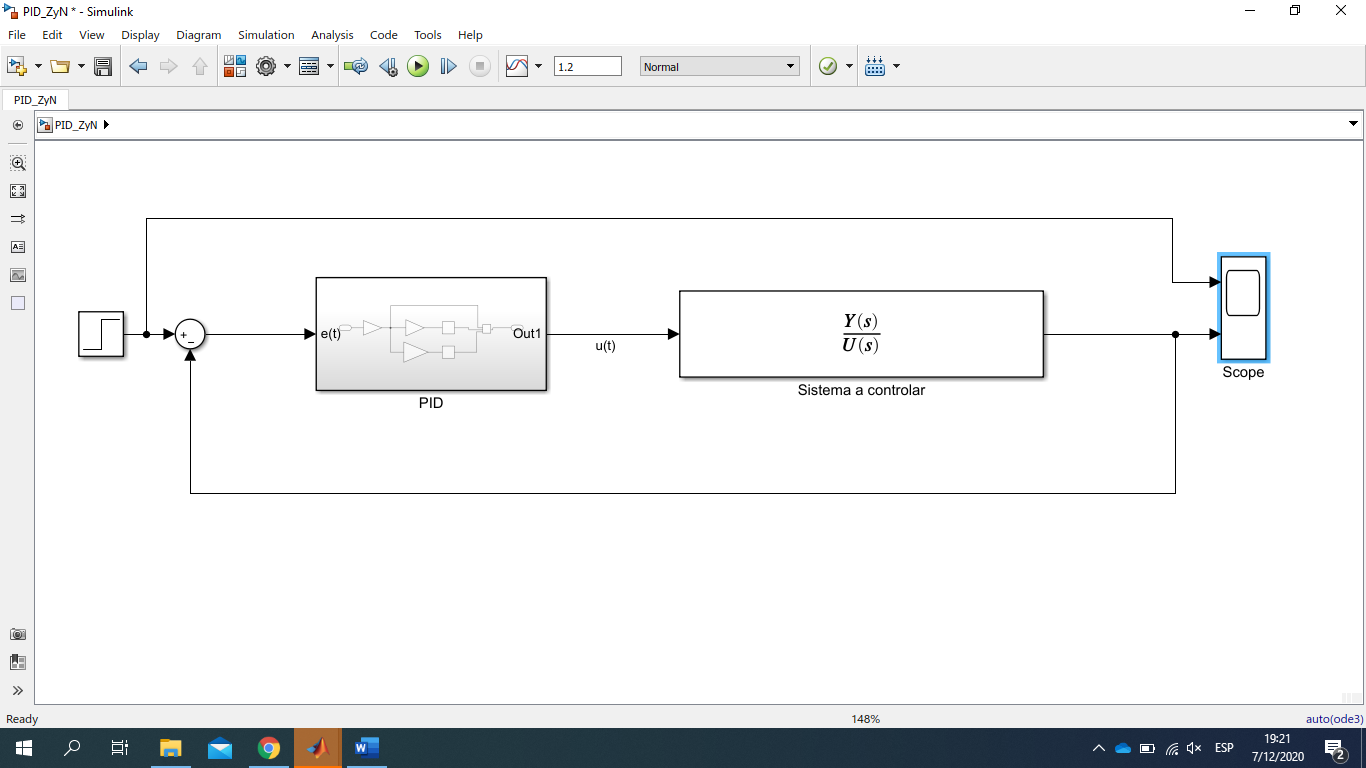
Figura 20. Sistema controlado completamente implementado
A continuación, mostramos los resultados de simulación

Figura 21. Respuesta del sistema controlado ante un escalón unitario en Simulink.
Ahora realizando el cambio en la consigna

Figura 22. Respuesta del sistema controlado ante un escalón valor 5 en Simulink.
Grafique la salida del sistema junto con la consigna del sistema.
Graficando tanto la consigna como la salida vemos que el controlador cumple la función obligatoria aparte de estabilizar el sistema la cual es llevar la respuesta al valor de la referencia.

Figura 23. Respuesta del sistema controlado y consigna.
Figura 24. Respuesta del sistema controlado y consigna en MATLAB
Observación: Hay una diferencia en las respuestas obtenidas en Matlab y Simulink en la magnitud en el estado estacionario. Atribuimos esta diferencia al filtro que está implícito en el bloque diferencial de Simulink.
De obtener un sobre impulso mayor al 25%. Realice un ajuste fino de los parámetros.
Para que el impulso sea menor al 25%, el valor máximo debería estar por debajo de 1.25, por lo tanto, vemos en la figura que sobrepasa este valor de forma significativa.
El ajuste fino que realizamos está en el término proporcional
KpFino=Kp/2
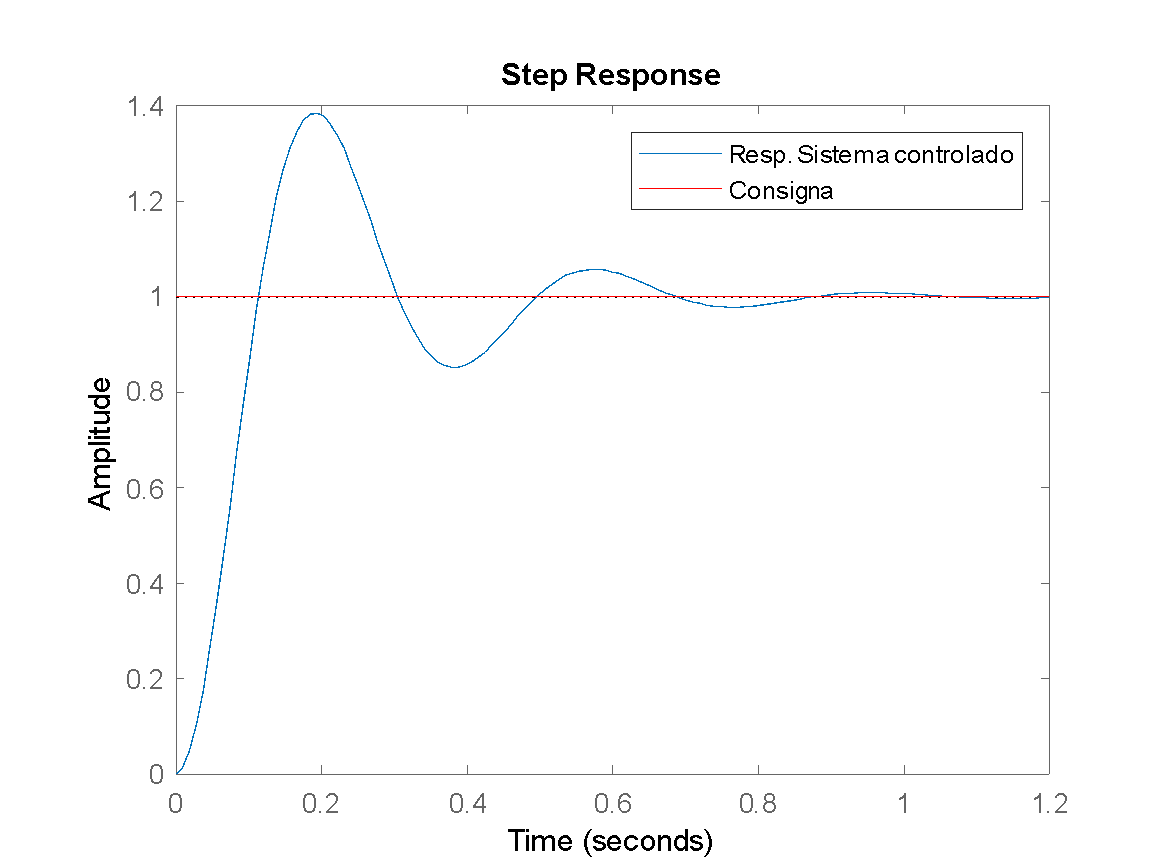
Figura 25. Respuesta del sistema controlado con KpFino=Kp/2
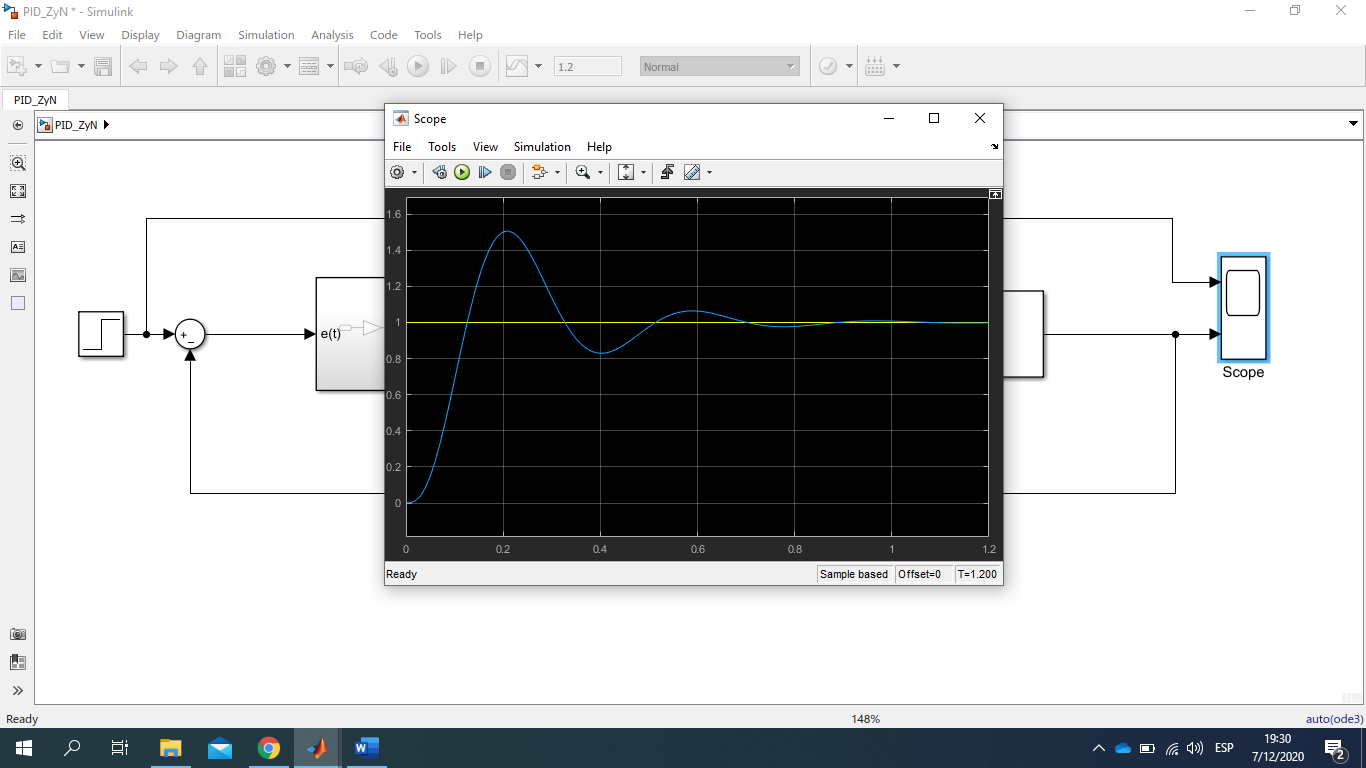
Figura 26. Respuesta del sistema controlado con KpFino=Kp/2 en Simulink
KpFino=Kp/4

Figura 27. Respuesta del sistema controlado con KpFino=Kp/4

Figura 28. Respuesta del sistema controlado con KpFino=Kp/4 en Simulink.
KpFino=Kp/6
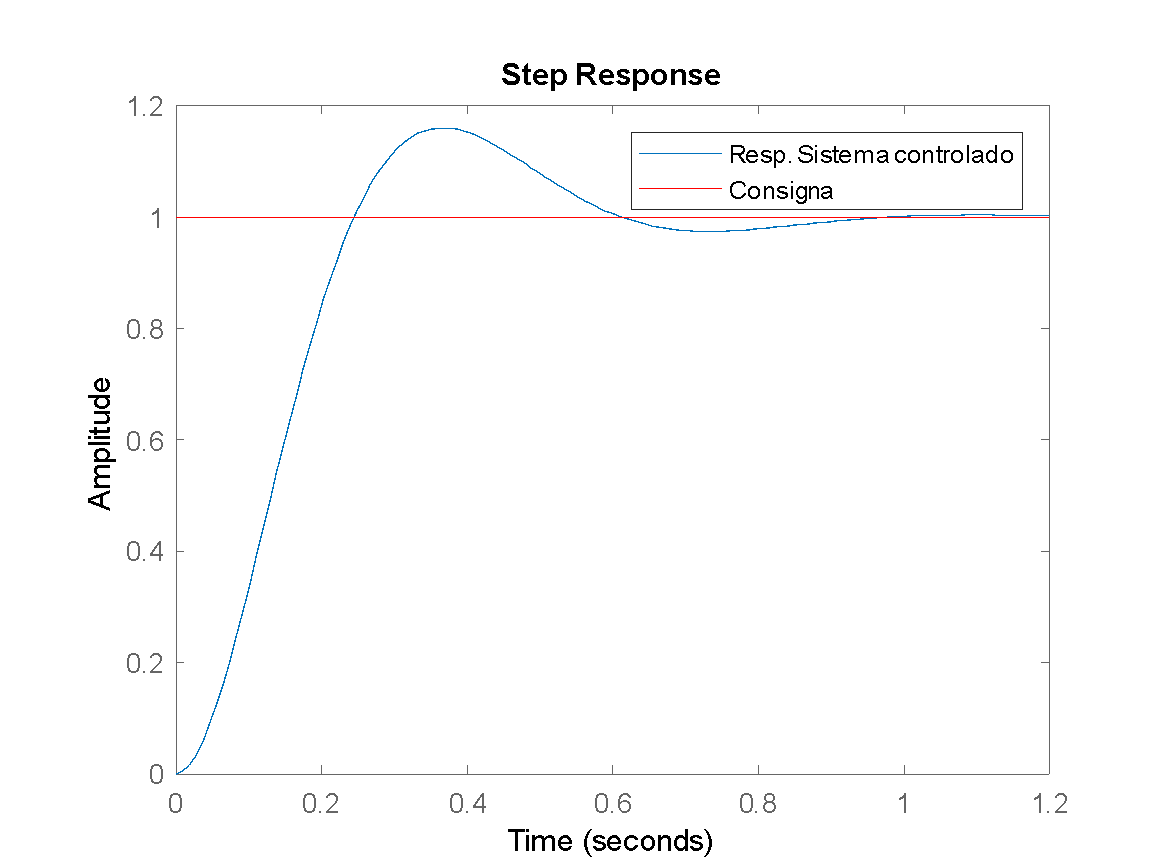
Figura 29. Respuesta del sistema controlado con KpFino=Kp/6

Figura 30. Respuesta del sistema controlado con KpFino=Kp/6 en Simulink
Podemos ver que haciendo ajustando el término proporcional podemos obtener respuestas con menor overshoot pero su vez, vemos que también varía el tiempo de estabilización. Podemos seguir ajustando hasta obtener valores como se ve a continuación.
KpFino=Kp/20
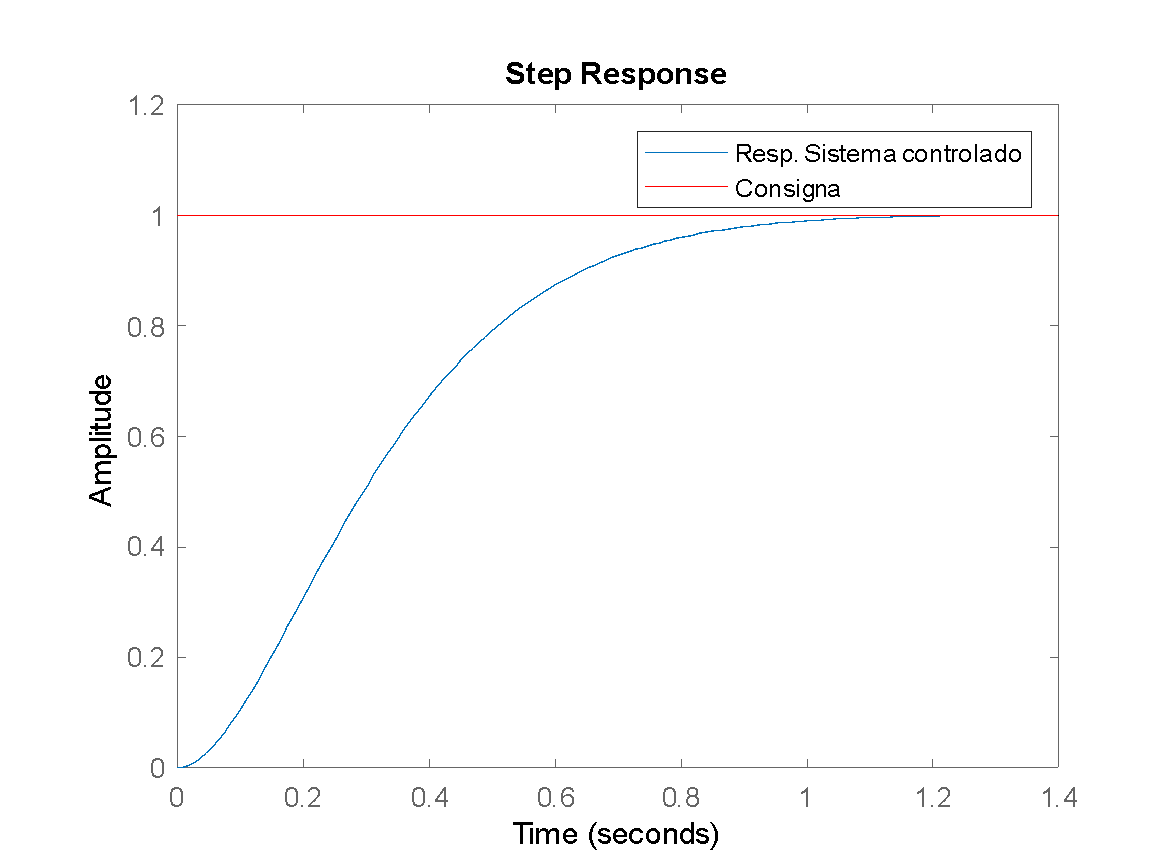
Figura 31. Respuesta del sistema controlado con KpFino=Kp/20

Figura 32. Respuesta del sistema controlado con KpFino=Kp/20 en Simulink
Vemos en la figura 32 que con Kp/20 obtenemos una respuesta con mayor retardo y sin sobre impulso. Dependiendo del sistema físico y de los requerimientos deseados para un rendimiento óptimo. Escogeremos la respuesta que más se ajuste de acuerdo a las necesidades de la planta.
Método de IMC
i. Con el modelo de primer orden con tiempo muerto de nuestro proceso, encuentre los parámetros del controlador PID usando el método del IMC, considerando f=𝝉/2.
KP =_____, Ti=_____y Td=_____
Modelo de primer orden del sistema:


Figura 33. Defino G(s) y el tiempo de simulación y la entrada escalón
Para hallar las constantes tau, tm y k debemos seguir el procedimiento de Ziegler and Nichols, definimos la variable “y” como la respuesta al escalón en el tiempo. Después derivamos “y” y obtenemos la pendiente “m” y el punto “p” donde ocurre la inflexión (máximo valor de la derivada).
Obtenemos a continuación el tiempo y la magnitud en el punto de inflexión. El tiempo de retardo “tm” será igual al tiempo en el cual la curva llega al punto de inflexión menos la altura del punto de inflexión dividido entre la pendiente. El “tau” es igual al valor estacionario de la respuesta menos el punto de inflexión entre la pendiente, todo sumado al tiempo en la inflexión menos el tiempo muerto. La constante “k” será el valor estacionario de la respuesta entre el tiempo estacionario de la entrada.

Figura 34. Hallo las constantes tau, tm y k
A partir de aquí podemos hallar las constantes kp, Ti y Td, necesarias para el controlador

Figura 35. Hallamos las constantes

Figura 36. Valor de las constantes “tf”, “kp”, “Ti” y “Td”
Kp=0.1831, Ti=0.2707, Td=0.0415
ii. Realice una simulación del comportamiento del sistema de control ante un cambio en la consigna (escalón unitario) usando la sintonía obtenida.
Utilizaremos el siguiente modelo:

Figura 37. Reordenamiento del sistema con IMC
GPIDs=Kp1+1Tis+sTd (22)
Donde:

Tabla 4. Control PID-IMC
En Matlab:
En Matlab primero, según el enunciado, definimos la constante tf=τ/2, y calculamos los parámetros Kp, Ti y Td según la tabla 4.

Figura 38. Controlador PID aplicando IMC y considerando tf=τ/2
En simulink:
En simulink, hemos obtenido los parámetros Kp, Ti y Td del script creado en Matlab. Después construimos el diagrama de bloques según el modelo PID.

Figura 39. Controlador PID aplicando IMC y considerando tf=τ/2
iii. Grafique la salida del sistema junto con la consigna del sistema.
En Matlab:

Figura 40. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=τ/2
En simulink:

Figura 41. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=τ/2
iv. Repita la simulación considerando f=𝝉/8 y f=2𝝉. ¿Cuál es el efecto en la respuesta del sistema?
Para tf=τ/8
En Matlab:
En Matlab primero, según el enunciado, definimos la constante tf=τ/8, y calculamos los parámetros Kp, Ti y Td según la tabla 4.

Figura 42. Controlador PID aplicando IMC y considerando tf=τ/8
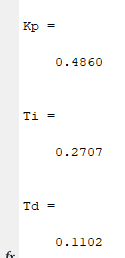
Figura 43. Valores de Kp, Ti y Td
Kp=0.4860, Ti=0.2707, Td=0.1102
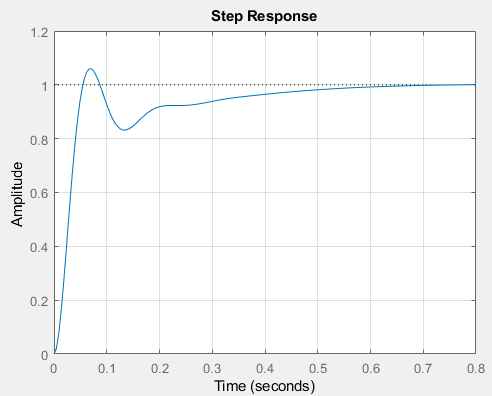
Figura 44. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=τ/8
En simulink:
En simulink, hemos colocado los parámetros Kp, Ti y Td que obtuvimos del script creado en Matlab (podemos verificar que son los mismos valores que aparecen en la figura 43).

Figura 45. Controlador PID aplicando IMC y considerando tf=τ/8

Figura 46. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=τ/8
Observación:
Hemos considerado un sistema con controlador PID en el que el termino derivativo sea “s” puro, sin embargo, en el caso que lo consideremos la parte derivativa como un filtro: s/(sN+1), la salida seria la siguiente:

Figura 47. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=τ/8
Efecto de la respuesta en el sistema:
Podemos observar que el efecto de que tf=τ/8 provoca una sobreelongacion (un pico máximo y minimo), con la función “Cursor Measurements” podemos medir el tiempo en el que ocurre la sobreelongacion y la magnitud de este:

Figura 48. Tiempo y magnitud de la sobreelongacion
La sobreelongacion ocurre en el tiempo 0.069 y su magnitud es de 1.081, y el pico mínimo ocurre en el tiempo 0.132 y su valor es de 0.132.
Para tf=2τ
En Matlab:
En Matlab primero, según el enunciado, definimos la constante tf=2τ, y calculamos los parámetros Kp, Ti y Td según la tabla 4.

Figura 49. Controlador PID aplicando IMC y considerando tf=2τ
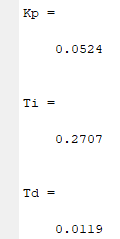
Figura 50. Valores de Kp, Ti y Td
Kp=0.0524, Ti=0.2707, Td=0.0119

Figura 51. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=2τ
En simulink:
En simulink, hemos colocado los parámetros Kp, Ti y Td que obtuvimos del script creado en Matlab (podemos verificar que son los mismos valores que aparecen en la figura 50).

Figura 52. Controlador PID aplicando IMC y considerando tf=2τ

Figura 53. Respuesta del sistema con un controlador PID aplicando IMC y considerando tf=2τ
Efecto de la respuesta en el sistema:
Podemos observar que el efecto de que tf=2τ provoca que el sistema sea sobreamortiguado. Ya no tiene sobreelongaciones pero se demora más en llegar a la referencia.
4. Compare estas dos respuestas ¿Cuál tiene un mejor desempeño? Justifique su respuesta basado en algún criterio integral.
Comparación de las respuestas del IMC (cuando tf=τ/2, cuando tf=τ/8 y tf=2τ) y del método Ziegler and Nichols a través de los criterios integrales de error absoluto (IAE) e integral del tiempo por el error absoluto (ITAE)
En Matlab
Ziegler and Nichols
Recordemos que como la entrada es escalón unitario, la función en el tiempo de esta lo tomaremos como 1. Por lo tanto, el error es e(t)=1-y(t). Siendo y(t) la función de salida en el dominio del tiempo. Para calcular la integral usaremos la función “trapz”, que sirve para calcular una integral a través del método numérico conocido como trapezoide:
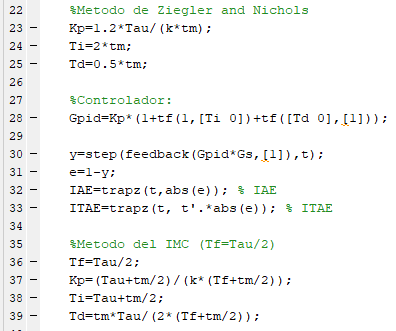
Figura 54. Script para hallar IAE e ITAE
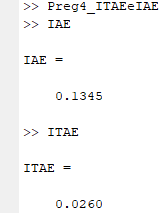
Figura 55. Obtención del IAE e ITAE
Para el método de Ziegler and Nichols: IAE=0.1345, ITAE=0.0260
IMC
Para el caso de tf=τ/2:
Recordemos que como la entrada es escalón unitario, la función en el tiempo de esta lo tomaremos como 1. Por lo tanto, el error es e(t)=1-y1(t). Siendo y1(t) la función de salida en el dominio del tiempo. Para calcular la integral usaremos la función “trapz”, que sirve para calcular una integral a través del método numérico conocido como trapezoide:
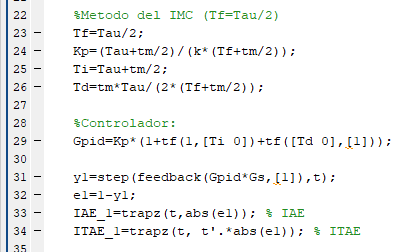
Figura 56. Script para hallar IAE e ITAE
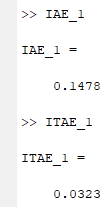
Figura 57. Obtención del IAE e ITAE
Para tf=τ/2: IAE=0.1478, ITAE=0.0323
Para el caso de tf=τ/8:
Recordemos que como la entrada es escalón unitario, la función lo tomaremos como 1. Por lo tanto, el error es e(t)=1-y2(t). Siendo y2(t) la función de salida en el dominio del tiempo. Para calcular la integral usaremos la función “trapz”, que sirve para calcular una integral a través del método numérico conocido como trapezoide:
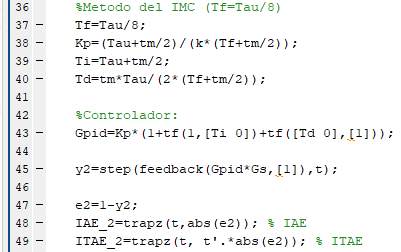
Figura 58. Script para hallar IAE e ITAE
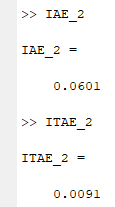
Figura 59. Obtención del IAE e ITAE
Para tf=τ/8: IAE=0.0601, ITAE=0.0091
Para el caso de tf=2τ:
Recordemos que como la entrada es escalón unitario, la función lo tomaremos como 1. Por lo tanto, el error es e(t)=1-y3(t). Siendo y3(t) la función de salida en el dominio del tiempo. Para calcular la integral usaremos la función “trapz”, que sirve para calcular una integral a través del método numérico conocido como trapezoide:
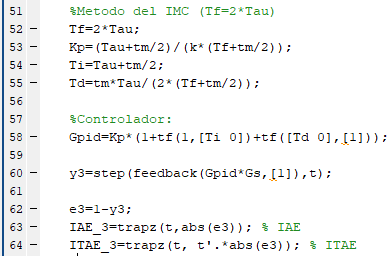
Figura 60. Script para hallar IAE e ITAE

Figura 61. Obtención del IAE e ITAE
Para tf=2τ: IAE=0.5161, ITAE=0.3021
En simulink
Para hacerlo en simulink debemos ahora transladar los valores de simulink a Matlab con el bloque “To workspace” para realizar el IAE y el ITAE.
Ziegler and Nichols

Figura 62. Sistema con Controlador Z&N
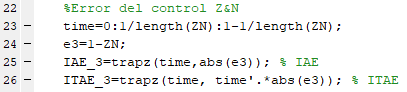
Figura 63. Script para hallar IAE e ITAE

Figura 64. Obtención del IAE e ITAE
Para el método de Ziegler and Nichols: IAE= 0.0198, ITAE=0.0003764
IMC
Para el caso de tf=τ/2:

Figura 65. Sistema con Controlador PID-IMC con tf=τ/2

Figura 66. Script para hallar IAE e ITAE
Figura 67. Obtención del IAE e ITAE
Para tf=τ/2: IAE=0.0179, ITAE=0.0002604
Para el caso de tf=τ/8:

Figura 68. Sistema con Controlador PID-IMC con tf=τ/8
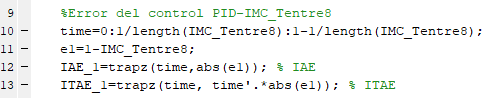
Figura 69. Script para hallar IAE e ITAE

Figura 70. Obtención del IAE e ITAE
Para tf=τ/8: IAE=0.0195, ITAE=0.00046135
Para el caso de tf=2τ:
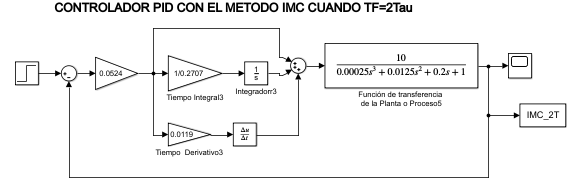
Figura 71. Sistema con Controlador PID-IMC con tf=2τ
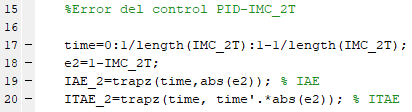
Figura 72. Script para hallar IAE e ITAE
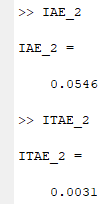
Figura 73. Obtención del IAE e ITAE
Para tf=2τ: IAE=0.0546, ITAE=0.0031
Observación: Hemos visto que la medición del IAE y del ITAE son distintos en Matlab y Simulink. Esto es debido a distintos factores: Primero, los puntos de análisis que se toman en Matlab y Simulink. Ademas, en simulink se considera un filtro (s/s+1) en lugar de una derivada “s”. Además, es imposible integrar desde 0 hasta infinito, en Matlab integramos de 0 a 5 (la simulación se ralentiza si tomamos más puntos), y en simulink integramos de 0 a 10. Eso hace que las mediciones sean distintas. Tomaremos de referencia el simulink
¿Cual tiene mejor desempeño?
Analizando los resultados obtenidos de tiempo de error absoluto y del tiempo por el error absoluto, podemos decir que cuando tf=τ/2 el sistema presenta mejor desempeño. Ya que los valores del IAE y del ITAE son menores. Seguido del método con controlador IMC con tf=τ/8. Aunque hay que recalcar que el sistema cuando tf=τ/8, presenta sobreelongaciones que podrían dañar el sistema. Podemos darnos cuenta que el siguiente que sigue en la lista de desempeño es el método Ziegler and Nichols. El que tiene peor desempeño es el IMC con tf=2τ. A continuación, mostramos una gráfica del scope con todas las respuestas del sistema.
Señal amarilla: Control PID-Z&N
Señal rojo: Control PID-IMC con tf=τ/8
Señal celeste: Control PID-IMC con tf=τ/2
Señal verde: Control PID-IMC con tf=2τ

Figura 74. Comparación de todas las respuestas con los distintos controladores.
5. Ahora en el lazo de control realimentado programado en el ejercicio 2, agregue una entrada de perturbación en la entrada del proceso.
Hemos introducido una distorsión tal y como indica el enunciado. Analizaremos la salida utilizando ambos métodos.
Ziegler and Nichols:

Figura 75. Control PID-Z&N
IMC:

Figura 76. Control PID-IMC
6. Simule el sistema con una perturbación escalón de magnitud del 2% de la entrada tanto para la sintonía obtenida por el método Ziegler-Nichols como para la obtenida usando IMC.
Ziegler-Nichols:

Figura 77. Control PID-Z&N

Figura 78. Grafica de la respuesta del control PID-Z&N con una perturbación
Análisis: Para el caso del control PID-Z&N, introducirle una distorsión no provoco demasiada alteración en cuanto al comportamiento de la respuesta.
IMC:
Figura 79. Control PID-IMC
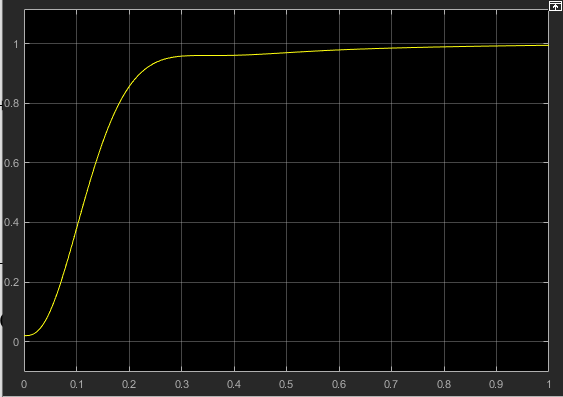
Figura 80. Grafica de la respuesta del control PID-IMC con una perturbación
Análisis: Para el caso del control PID-IMC, introducirle una distorsión hizo que la señal de salida alcanzara un valor más cercano al valor de la referencia.
7. Compare estas dos respuestas ¿Cuál tiene un mejor desempeño? Justifique su respuesta basado en algún criterio integral.
Comparación:
Para realizar la comparación extraigo los valores de salida de ambos sistemas (usando el bloque To workspace) y calculo la integral del error absoluto (IAE) y la integral del tiempo por el error absoluto (ITAE):
Z&N:
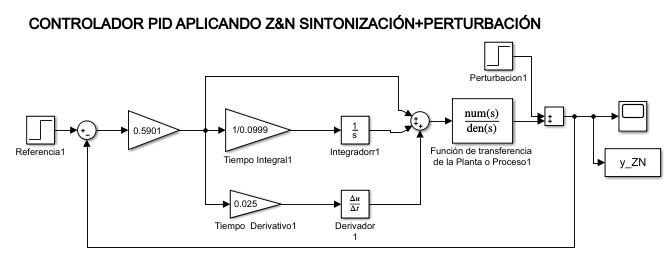
Figura 81. Trasladamos el valor de la salida al workspace del Matlab

Figura 82. Script para hallar IAE e ITAE

Figura 83. Obtención del IAE e ITAE
Para Z&N: IAE=0.2363, ITAE=0.0421
IMC:
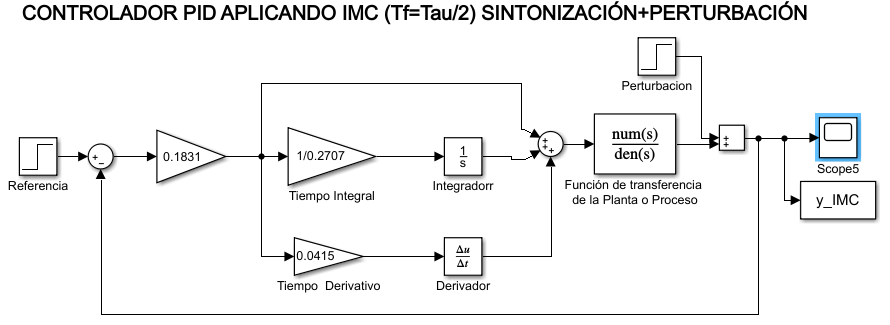
Figura 84. Trasladamos el valor de la salida al workspace del Matlab

Figura 85. Script para hallar IAE e ITAE

Figura 86. Obtención del IAE e ITAE
Para tf=τ/2: IAE=0.2229 e ITAE=0.0319
¿Cual tiene mejor desempeño?
Analizando los resultados obtenidos de tiempo de error absoluto y del tiempo por el error absoluto. Podemos decir que el PID–IMC tiene mejor desempeño que el PID- Z&N con tf=τ/2 cuando se le introduce una perturbación. Ya que el PID–IMC tf=τ/2 no le afecta tanto el ruido como al PID- Z&N.
8. Investigue sobre alguna regla de sintonía para controladores PID basado en los criterios de desempeño de los sistemas de control (IAE, ISE, ITAE).
El método basado en criterios integrales que se presenta es el Método de López, Miller, Smith y Murril, más conocido como el método López ya que este fue el primero en postularlo. Este método presentó ecuaciones para el cálculo de los parámetros del controlador. Definiendo una función de costo de la forma:
ϕ=0F(et,t)dt (23)
Donde F es una función del error y del tiempo, se obtiene un valor que caracteriza la respuesta del sistema. Entre menor sea el valor de Φ, mejor será el desempeño del sistema de control, por ello, un desempeño óptimo se obtiene cuando Φ es mínimo. Como Φ es una función de los parámetros del controlador (Kc, Ti, Td), el valor mínimo de Φ se obtiene resolviendo las siguientes ecuaciones
∂ϕKc=0, ∂ϕTi=0, ∂ϕTd=0 (24)
Los criterios de desempeño utilizados por López fueron: Integral del error absoluto (IAE), Integral del error absoluto por el tiempo (ITAE) e Integral del error cuadrático (ISE). La optimización de los criterios de desempeño integrales de López está basada en el mejor modelo de primer orden más tiempo muerto que se pueda obtener, para lazos de control que funcionan como reguladores con un controlador PID-Ideal. Las ecuaciones de sintonización son:
KcK=a(tm)b (25)
Ti=1c(tm)-d (26)
Td=e(tm)f (27)
Los valores para las constantes ‘a’ hasta ‘f’ para los diferentes criterios se encuentran en la tabla siguiente.
Tabla 5. Constantes para las ecuaciones del método de López
Siendo el controlador:
Gcs=Kc(1+1Tis+TdsTds+1) (28)
9. Sintonice un controlador PID para el proceso G(s) basado en la regla investigada en el punto anterior.
ITAE (método de López)
a=1.357, b=-0.947, c=0.842, d=-0.738, e=0.381, f=0.995
Con los parámetros obtenidos de Ziegler and Nichols:
k=0.5901, tm=0.05, Tau=0.2457
Nos toca hallar Kc, Td y Ti

Figura 87. Script para hallar las constantes Kc, Td y Ti

Figura 88. Resultados de Kc, Td y Ti
Ahora armamos nuestro diagrama de bloques en Simulink y analizamos la respuesta:

Figura 89. Diagrama de bloques del PID con el método de López

Figura 90. Grafica de la respuesta del control PID-Método de López
Análisis:
Podemos observar que con este método se le da más énfasis a la constante. Podría ser útil para aproximarnos de forma más rápida a la salida sin importar que el sistema sea oscilatorio. Sin embargo, la sobreelongacion que tiene puede ser muy perjudicial. En a siguiente figura analizamos dicha sobreelongacion:
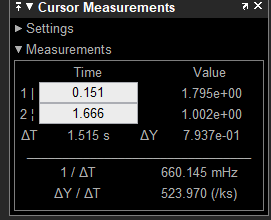
Figura 91. Análisis en el tiempo de la respuesta del control PID-Método de López
Observamos que para el tiempo 0.159 segundos el sistema tiene una altura máxima de 1.795. Y se estabiliza en el tiempo 1.666 segundos
10. Compárela con las sintonías anteriores.
Comparación de la sintonía para controladores PID basado en el método de López y sintonía por IMC y Ziegler and Nichols
Observando las gráficas de respuestas podemos hacer las siguientes comparaciones:
El controlador PID con el método de López tiene mayor sobreelongacion y presenta mayor oscilación. Aunque llega al valor de referencia más rápido y se estabiliza aproximadamente a los 1 segundos.
El controlador PID-Z&N es el que más se parece al controlador PID con el método de López. Ambos presentan sobreelongaciones y oscilaciones. Aunque el controlador PID-Z&N no tiene cambios tan abruptos.
El controlador PID con el método de López prioriza llegar más rápido a la referencia. Está diseñado para hacer que el error sea de “0” lo más rápido posible. Aunque eso implique tener un comportamiento brusco, que puede ocasionar en pérdidas de energía y altos voltajes en la salida.
CONCLUSIONES
El controlador PID-IMC con tf=τ/2 y tf=2τ la respuesta presenta una respuesta al escalón de tipo sobreamortiguado. Mientras que un controlador PID-IMC con tf=τ/8, presenta una respuesta al escalón de tipo subamortiguado.
Una de las características que debemos tener en cuenta es el rechazo a las perturbaciones. Hemos comprobado en la guía, a través de los criterios integrales de IAE e ITAE que el controlador PID-Z&N presenta un mayor rechazo de perturbaciones que el controlador PID-IMC con tf=τ/2.
Las sobreelongaciones generan más esfuerzo de control. Cuando un sistema tiene un comportamiento oscilatorio va a generar cambios bruscos dependiendo de cuan oscilatorio sea el sistema. Esto, en algunos casos no genera mayores problemas. Pero en otros casos va a hacer evitable y es preferible elegir un controlador PID que no presente este movimiento oscilatorio y que no sobrepase el valor de la referencia.
El controlador PID-Método de López llega muy rápido al valor de referencia, pero es el que tiene un mayor pico en su respuesta de salida (casi un 80% mayor que su voltaje de referencia).
Se concluye que un controlador PID nos brindará un sistema que efectivamente cumpla con llegar al nivel de referencia a distintos cambios en la consigna del sistema.
Se puede realizar ajustes en el controlador PID dependiendo de los requerimientos del proceso o para cuidar el sistema de daños ante los picos en la etapa transitoria. Asimismo, podemos variar la velocidad de respuesta.
REFERENCIAS
[1] Katsuhiko Ogata. Teoría de Control Moderna. Cap. 7.
[3] García Yhon y Lobo Israel. Controlador PID por la estructura de control de modelo interno (IMC) y lógica difusa.





