

PROCESAMIENTO DIGITAL DE SEÑALES
🔴 En este articulo encontrarás:
Introducción
¿Qué son las señales?
Las señales son una representación de la evolución de un fenómeno en forma temporal y espacial, ya sea físico o de otra naturaleza. Las señales mas habituales son: La temperatura, la presión, el desplazamiento, el sonido o la voz, etc.

Tipos de señales
Los tipos de señales que existen son: analógicos, discretos, cuantizados y digitales. Cuando el tiempo es continuo y la amplitud es continua estamos hablando de una señal analógica. Cuando el tiempo es discreto y la amplitud es continua estamos hablando de una señal discreta. Cuando el tiempo es continuo y la amplitud es discreta estamos hablando de una señal cuantizada. Y cuando el tiempo es discreto y la amplitud es discreta estamos hablando de una señal digital.




Procesamiento digital de señales








Señales en tiempo discreto
Las señales en tiempo discreto se obtienen mediante el muestreo de un señal continua en el tiempo y se representan como secuencias.
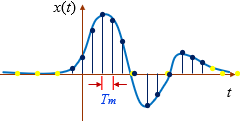
Esto se puede entender mejor con la siguiente grafica. Supongamos que tengo una función continua x(t). Si yo quiero pasar esta función a una señal discreta, primero tengo que muestrear dicha señal, con un periodo de muestreo igual a Tm. De tal forma que estoy obteniendo el valor de la señal continua solo en algunos puntos, y son con esos valores que formamos una señal discreta.
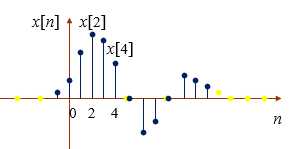

Si a esa señal continua nosotros pretendemos convertirla en una señal discreta, nos quedaría de la siguiente manera:

Si somos muy observadores, nos daremos cuenta que esta señal senoidal discreta tiene 33 valores discretos. La cantidad de valores discretos que se pueden obtener de una señal continua depende del tiempo de muestreo Tm, mientras mas pequeño sea el valor del tiempo de muestreo, mas muestras se podrán obtener. Por el contrario, si el tiempo de muestreo crece, se obtendrán menos valores discretos y la señal discreta se parecerá menos a la señal continua de la que se obtuvo.


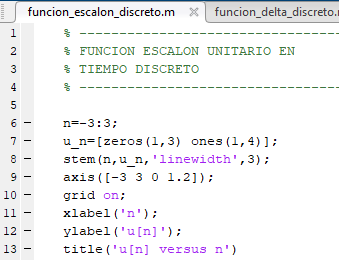
Esta función expresada en Matlab seria de la siguiente manera:

Otra función muy conocida es la función escalón. Esta función indica que la señal discreta "u[n]" va a ser 0 cuando el tiempo discreto n sea menor a 0. Y va a ser 1 cuando el tiempo discreto sea mayor o igual a 0. Como lo indica la siguiente imagen:



Operaciones básicas
Desplazamiento en el tiempo
- Si k>0, se dice que corresponde a una operación de retardo. Oséa, la señal empieza después de n=0. En otras palabras, la señal esta retardada.
|
n |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
x[n] |
x[0] |
x[1] |
x[2] |
x[3] |
x[4] |
x[5] |
x[6] |
x[7] |
|
y[n]= x[n-1] |
x[-1] |
x[0] |
x[1] |
x[2] |
x[3] |
x[4] |
x[5] |
x[6] |
|
n |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
x[n] |
x[0] |
x[1] |
x[2] |
x[3] |
x[4] |
x[5] |
x[6] |
x[7] |
|
y[n]= x[n-2] |
x[-2] |
x[-1] |
x[0] |
x[1] |
x[2] |
x[3] |
x[4] |
x[5] |
- Si k<0, corresponde a una operación de adelanto. Oséa, la señal empieza antes de n=0. En otras palabras, la señal esta adelantada.
n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
x[n] | x[0] | x[1] | x[2] | x[3] | x[4] | x[5] | x[6] | x[7] |
y[n]= x[n+1] | x[1] | x[2] | x[3] | x[4] | x[5] | x[6] | x[7] | x[8] |
n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
x[n] | x[0] | x[1] | x[2] | x[3] | x[4] | x[5] | x[6] | x[7] |
y[n]= x[n+2] | x[2] | x[3] | x[4] | x[5] | x[6] | x[7] | x[8] | x[9] |


El up-sampling expresado en diagrama de bloques seria de la siguiente manera: La señal entrada es x[n] que va a someterse a un up-sampling, y nos da como resultado la señal interpolada xu[n]


|
n |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
x[n] |
x[0] |
x[1] |
x[2] |
x[3] |
x[4] |
x[5] |
x[6] |
x[7] |
|
y[n]= x[n/2] |
x[0] |
0 |
x[1] |
0 |
x[2] |
0 |
x[3] |
0 |
El down-sampling expresado en diagrama de bloques seria de la siguiente manera: La señal entrada es x[n] que va a someterse a un down-sampling, y nos da como resultado la señal x_d[n]

Para entender mejor este concepto, vamos a realizar el siguiente ejemplo: Supongamos que M=2. Para este caso, cuando n=0, la señal de salida "y" va a ser x evaluado en 2*0, lo que significa que y[n] va a estar evaluado en x[0]. Si ahora n vale 1, y[n] debería ser evaluado en x[2]. Si n vale 2, y[n] va a ser evaluado en x[4]. Si n vale 3, y[n] va a ser evaluado en x[6]. Si suponemos que x[7] es la ultima muestra de la señal, y[n] solo existirá hasta y[3]. Podemos darnos cuenta que la salida solo toma muestras múltiplos del valor de M , que en este caso es 2, las demás muestras son descartadas. Si M valdría 3, solo se mostraría en la salida las muestras múltiplos de 3. Si M valdría 4, solo se mostraría en la salida las muestras múltiplos de 4 y así sucesivamente. Además, "y" tiene la mitad de duración de la señal de entrada "x". Esto también se debe al valor de M=2. Si M valdría 3, "y" duraría una tercera parte de "x". Si M valdría 4, "y" duraría una cuarta parte de "x", y así sucesivamente.

n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
x[n] | x[0] | x[1] | x[2] | x[3] | x[4] | x[5] | x[6] | x[7] |
y[n]= x[2n] | x[0] | x[2] | x[4] | x[6] | 0 | 0 | 0 | 0 |



Visita nuestro canal de YouTube para mas contenido: https://www.youtube.com/channel/UC93Nt6sA-7r_S7EtGO44GeA





