Autores: Mauro Montoya Arenas
Leonel Breña Dávila
ANALISIS FRECUENCIAL
Resumen: En el presente documento hicimos énfasis en el análisis de un sistema de 2° orden específicamente del motor DC y la variación del parámetro inductivo de su armadura conlleva a tener otro tipo de respuesta que será evaluadas mediante un resultado de transferencia sin aproximar y uno simplificado a un sistema de 1° orden , además se detalla el proceso de obtención de respuesta temporal analíticamente usando la transformada inversa de Laplace para cada caso y para cada respuesta escalón , impulso y rampa unitaria en primera parte, luego se hace una deducción del resultado aproximado que, en efecto es válido para nuestro sistema con valor de inductancia cambiado y que tiene cierta condición justificándose matemáticamente. Finalmente se hizo un análisis de la obtención del resultado aproximado mostrado en Simulink y sus diferencias con el resultado real llegando a una conclusión que es concordante con lo analizado en el gráfico de polos y ceros.
I. INTRODUCCION
Hoy en día, el ingeniero cuenta con una amplia gama de herramientas computacionales que reducen los cálculos de forma exponencial, pero es importante saber que el análisis y la habilidad de interpretar resultados como gráficas que detallan el comportamiento de un sistema, o para este caso, su estabilidad, es una necesidad que siempre va a existir para los profesionales que llevan sus conocimientos a un nivel mayor que el simple empirismo. Bajo este contexto, se realizó el presente informe con el objetivo de detallar el proceso de obtención de gráficas de forma computacional y para contrastarlas con las obtenidas de forma manual, demostrando de esa forma, la suficiencia de tener una base teórica bastante solida siendo capaces que identificar cada detalle de la gráfica a realizar y una vez hecha, seremos capaces de interpretar la estabilidad relativa, datos que se encuentran implícitos en las gráficas de Bode y Nyquist. Además de lo ya mencionado, buscar la correlación entre ambos gráficos mostrará que contamos con un conocimiento bastante sólido en lo que la respuesta en frecuencia se refiere.
II. MARCO TEORICO
Diagramas de Bode
Cuando hablamos de respuesta en frecuencia en sistemas de control, es imposible no referirnos también a los diagramas de Bode. De acuerdo con [2], Un diagrama de Bode está formado por dos gráficas: una es la gráfica del logaritmo de la magnitud de la función de transferencia sinusoidal, y la otra es la gráfica del ángulo de fase; ambas se dibujan contra la frecuencia en escala logarítmica. El análisis que usaremos será la aproximación asintótica y dentro de esta, es de vital importancia conocer los casos principales a analizar
Término constante: Para la ganancia K, la magnitud es de 20 log10K y la fase es de 0°; ambas son constantes con la frecuencia. Por lo tanto, los diagramas de magnitud y de fase de la ganancia se indican en la figura 14.9. Si K es negativa, la magnitud sigue siendo de 20 log10 |K|, pero la fase corresponde a -180°.
Polo/cero en el origen: Para el cero (jꞷ) en el origen, la magnitud es de 20 log10ꞷ lo que se traduce en 20 dB/década, en tanto que la fase es constante con la frecuencia. y la fase corresponde a 90°. Los diagramas de Bode para el polo (jꞷ) -1 son similares, salvo que la pendiente del diagrama de magnitud sea de -20 dB/década, mientras que la fase es -90°. En general, para (jꞷ) N, donde N es un entero, el diagrama de magnitud tendrá una pendiente de 20N dB/década, mientras que la fase es de 90N grados.
Polo/cero simple: Para un cero simple (1 + jꞷ/z1), la magnitud es de 20 log10 |1+jꞷ/z1| y la fase equivale a tan-1 ꞷ/z1.
Notar que para ꞷ→0
20𝑙𝑜𝑔1 = 0 (1)
Para ꞷ→∞
20𝑙𝑜𝑔(𝜔/𝑧1) (2)
Lo que muestra que se puede aproximar la magnitud como cero (una línea recta con pendiente cero) para valores pequeños de ꞷ y mediante una línea recta con pendiente de 20 dB/década para valores grandes de ꞷ.
La fase tan-1(ꞷ/z1) se puede expresar como

Polo cuadrático/cero: La magnitud del polo cuadrático


Por lo tanto, el diagrama de amplitud está compuesto de dos líneas rectas asintóticas: una con pendiente cero para ꞷ < ꞷn, y la otra con pendiente -40 dB/década para ꞷ>ꞷn, con ꞷn como la frecuencia de esquina (quiebre). Con respecto a la fase, la definimos de la siguiente manera:

Calculando el valor de la fase a distintos valores de frecuencia:


Diagramas de Nyquist


Consideremos el sistema de control a lazo cerrado de la Figura 4:


Estabilidad vía el Diagrama de Nyquist
II. MATERIALES Y METODOS
A. ESQUEMAS

B. PROCEDIMIENTO
01. Con la función de transferencia de segundo orden y los parámetros de la Tabla 1
a. Dibuja el siguiente diagrama en Simulink

En el bloque Transfer Fcn, se debe escribir la función de transferencia de segundo orden del motor DC. La amplitud de la entrada siempre será 1 y la fase 0. Implementando en Simulink se obtuvo:

b. Grafica la respuesta del sistema para las siguientes frecuencias y completa la siguiente tabla.







c. Realiza un esbozo de los diagramas de Bode. (Justifique y explique cada trazado de su esbozo).
La tabla con los valores de los parámetros se muestra a continuación:



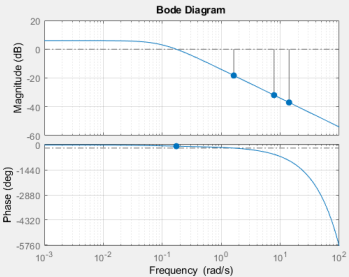
El diagrama de amplitud está compuesto de dos líneas rectas asintóticas, una con pendiente cero para ꞷ < ꞷn, y la otra con pendiente -40 dB/década para ꞷ > ꞷn, con ꞷn como la frecuencia de esquina (quiebre). Entonces, notamos que la frecuencia de esquina será ꞷn=2.473 y para el término constante K se obtiene

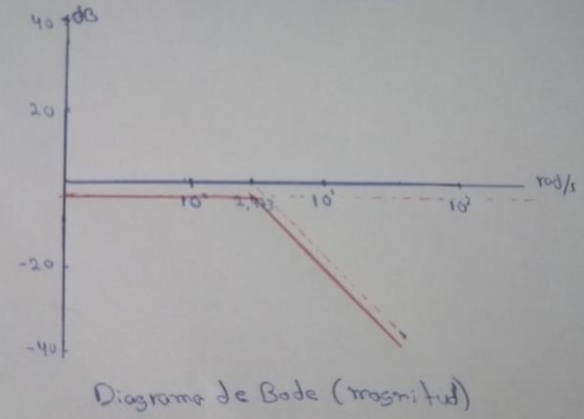
Para el diagrama de la fase es una recta con una pendiente de - -90° por década, se empieza en 𝜔n/10 y termina en 10𝜔n. Ya que podemos considerar tratar a este polo cuadrático como un polo doble si no consideramos el efecto que tiene el factor de amortiguamiento. La expresión para la fase sería:

Como el término constante es positivo, la fase de este se mantendrá en 0° y tenemos que la gráfica se realiza a -90° por década en una década anterior y posterior de la frecuencia de esquina ꞷn=2.473. d.
d. Realiza los diagramas de Bode con el comando de Matlab (Bode) y compara las curvas obtenidas con los resultados de fase y magnitud de la Tabla 2.
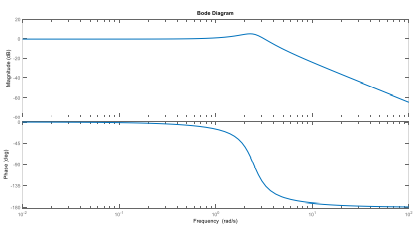
Luego, se realizó el acercamiento para cada frecuencia de interés de la tabla 1.






e. Realiza un esbozo del diagrama de Nyquist. (Justifique y explique cada trazado de su esbozo).
Tener en cuenta los siguientes valores que fueron calculados en el análisis de Bode.
Evaluamos entonces:

- Para 𝜔 = 0



f. Realiza el diagrama de Nyquist con el comando de Matlab (Nyquist). Muestra y explica, de manera detallada, las correspondencias entre los diagramas de Bode y el diagrama de Nyquist.


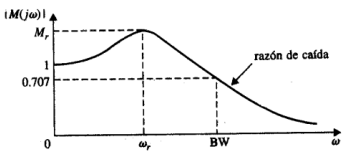
Habiendo mostrado el diagrama de Bode y Nyquist, analizaremos distintos puntos para ver la correlación y lo que representan en cada gráfica. Cuando ꞷ→0 obtuvimos en g, nos da un valor de magnitud equivalente al término constante K=0.96, que viene a ser el punto de inicio del diagrama de Nyquist. Para la fase, es fácil apreciar que el ángulo es de 0°, pues se encuentra la recta real de la gráfica Para hallar la relación entre Nyquist y Bode, debemos recordar que los diagramas de Bode son elaborados en dB, entonces, deberemos hacer la transformación respectiva a los valores de magnitud hallados en Nyquist.
Ubicando el punto inicial en los diagramas de Bode:

Haciendo un acercamiento obtenemos

Lo que nos indica que la asíntota de alta frecuencia (infinito por practicidad) es una recta con pendiente de -40 dB/década, quiere decir que si consideramos la gráfica de Bode a altísimas frecuencias, en nuestro sistema que tiene un polo cuadrático, en Nyquist se verá reflejado en el origen de coordenadas cuando en Bode significará una recta con pendiente de -40 dBs.

Haciendo un acercamiento obtenemos:

g. Con todas estas simulaciones
Dato que se obtuvo en el análisis de Nyquist. Además [1] nos dice: Nótese que el diagrama real depende del factor de amortiguamiento ξ, así como de la frecuencia de esquina (ruptura) ωn. En la figura 1, en el marco teórico, se muestra la respuesta del sistema ante diversos valores de factor de amortiguamiento, y al nosotros tener uno de 0.278, es decir <1, la presencia de un pico con un valor de resonancia en la cima era el esperado, eso quiere decir que habrá 2 puntos con el mismo valor de magnitud, antes y después del valor de resonancia.
02. Cambia el valor de la inductancia a La= 0.1H . Con esto podemos lograr un modelo simplificado del motor de primer orden, que es el siguiente:
a. Define este modelo simplificado del motor de la ecuación 2

Dándole forma para obtener el modelo de polo simple:


Donde identificamos que la frecuencia de esquina es:
b. Compara la respuesta en frecuencia (diagrama de Bode y diagrama de Nyquist) de ambos modelos (ecuacion1 y ecuación 2). ¿Hasta qué frecuencia dirías que la aproximación de primer orden es válida? ¿Por qué?


c. Compara los márgenes de estabilidad relativa para ambos modelos


d. Documente y describa la implementación y los resultados obtenidos.

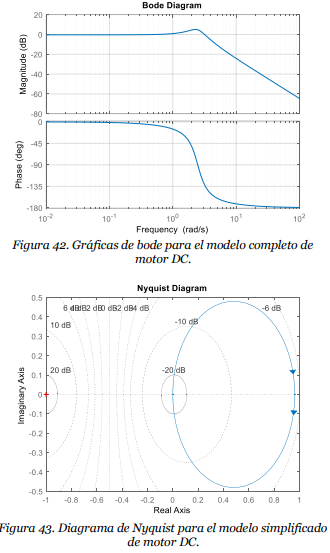
El resultado es el esperado, ya que en la figura 42 para el sistema completo vemos que, al valor de la frecuencia natural, el sistema presenta un aumento en su magnitud y un corrimiento de fase de -90°, mientras que para el modelo simplificado vemos que presenta una pequeña atenuación y un corrimiento de fase de 21° aproximadamente. De igual manera, mostraremos las respuestas frecuenciales a un valor de frecuencia menor a la unidad (ꞷ=0.5 rad/s)


3. Estabilidad relativa
a. Defina y explique claramente cuáles son los parámetros de estabilidad relativa.





b. Defina en Matlab la siguiente función de transferencia.
c. Obtén los parámetros de estabilidad y muéstralos en los diagramas de Bode. Adicionalmente, puedes utilizar la función margin para encontrar directamente los parámetros de estabilidad.




d. Dibuja los márgenes de fase y de ganancia sobre la gráfica polar. Compáralos con los obtenidos mediante el diagrama de bode. ¿Se corresponden?






e. Determine el valor de ganancia K (K crítico) que hace inestable al sistema en lazo cerrado. Muestre la respuesta temporal de lazo cerrado del sistema para los siguientes valores:














f. Documente y describa la implementación y los resultados obtenidos.
04. Efecto del retardo de tiempo
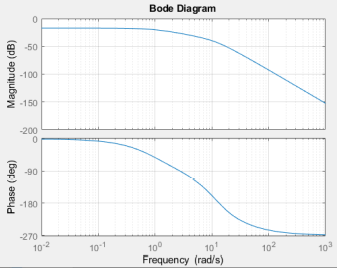
a. Esboza la respuesta en frecuencia (diagrama de Bode y Nyquist) de un retardo puro de 1 segundo. (Justifique y explique cada trazado de su esbozo).







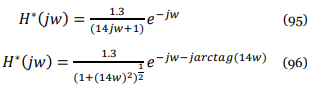
Ecuación de la magnitud:

Ecuación de la fase:
Sea w->0 (punto de inicio):

Sea w=0.1/τ=0.01:






b. Obtenga la respuesta en frecuencia (diagrama de Bode y Nyquist) utilizando los comandos de Matlab respectivos.



c. Hallar la respuesta en frecuencia de H(s)





d. Analizar y explica con detalle el efecto que casusa la adición a H(s) de un retardo de 1s en su respuesta en frecuencia.