

Autores: Mauro Benito Montoya Arenas (mauro2017pre@gmail.com)
Terry Quispe Paniagua (terryfiee2021@gmail.com)
Informe final N°5: Análisis Temporal
Resumen: En el presente documento hicimos énfasis en el análisis de un sistema de 2° orden específicamente del motor DC y la variación del parámetro inductivo de sus armadura conlleva a tener otro tipo de respuesta que será evaluadas mediante un resultado de transferencia sin aproximar y uno simplificado a un sistema de 1° orden , además se detalla el proceso de obtención de respuesta temporal analíticamente usando la transformada inversa de Laplace para cada caso y para cada respuesta escalón , impulso y rampa unitaria en primera parte, luego se hace una deducción del resultado aproximado que, en efecto es válido para nuestro sistema con valor de inductancia cambiado y que tiene cierta condición justificándose matemáticamente. Finalmente se hizo un análisis de la obtención del resultado aproximado mostrado en Simulink y sus diferencias con el resultado real llegando a una conclusión que es concordante con lo analizado en el gráfico de polos y ceros.
I. INTRODUCCION
Es importante entender el comportamiento de los sistemas , ya que casi todo los que nos rodea es un sistema desde nuestro organismo que cuenta con muchos sistemas como el sistema digestivo, inmunológico, respiratorio .etc. hasta los aparatos electrónicos que se basan en el modelado de sistemas , dicho esto es posible modelar y calcular la respuesta de un sistema basándonos en la física que interviene en dichos sistemas ,para evaluar la respuesta de un sistema ante una excitación de entrada se debe conocer su función de transferencia para someterlo al análisis por inspección desde ese punto, ante por ejemplo un escalón unitario y conocer cómo va a ser su comportamiento obviamente existen muchas clases de sistemas, en esta ocasión se analizara los sistemas de 1° y 2° orden y sus características propias.
II. MARCO TEORICO
Sistemas de primer orden: La función de transferencia de un sistema de primer orden es:
G(s)=N(s)/(s+a) (1)
donde N(s) es el polinomio del numerador de coeficientes constante al ser de tipo LTI. Por el principio de causalidad, el grado de N(s) es uno o cero, bien es una constante o es un cero de primer orden. Considérese el caso más simple, el numerador corresponde a una ganancia. La relación entre la entrada y salida del sistema vendrá dada por una ecuación diferencia ordinaria de primer orden:
Ty(t)+y(t)=kx(t) (2)
donde x(t) representa la señal en la entrada e y(t) es la salida. Aplicando a ambos lados de la igualdad la transformada de Laplace y considerando condiciones iniciales nulas, se conseguirá la FDT de los sistemas de primer orden.








Sistemas subamortiguados (0< 𝜁<1):


Nota: A continuación, se obtendrá el tiempo de subida, el tiempo pico, la sobreelongación máxima y el tiempo de asentamiento del sistema de segundo orden obtenido mediante la ecuación (30). Estos valores se obtendrán en términos de 𝜁 y 𝑤𝑛. Se supone que el sistema está subamortiguado (k=1).

Tiempo de subida (𝒕𝒓):

Tiempo pico (𝒕𝒑):

Tiempo de asentamiento (𝒕𝒔):

Sobre elongación (𝑴𝒑):






II. MATERIALES Y METODOS





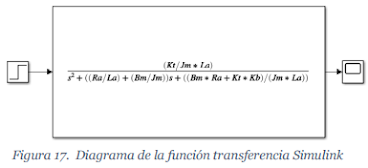
Remitiéndonos a la ec. 54 (función transferencia del motor) reemplazando los parámetros de la tabla 1 en esta ecuación, para llevarlo a la forma estándar, primero reemplazamos:



b. Definir en MATLAB la Función de Transferencia del motor en base a la ecuación (54).

Ejecutando el archivo .m con la ayuda del comando tf(num,den) definimos nuestro función transferencia que llamaremos sys y que se mostrara en el comand Windows como se sigue:




Claramente visualizamos lo descrito anteriormente coincidiendo con los resultados analíticos y resultando lo predicho con respecto a la evaluación del factor de amortiguamiento.


- Respuesta ante un escalón Ahora con la entrada escalón unitario transformándolo al dominio “s”, sabemos que el escalón unitario en laplace se representa por “1/s”, entonces:

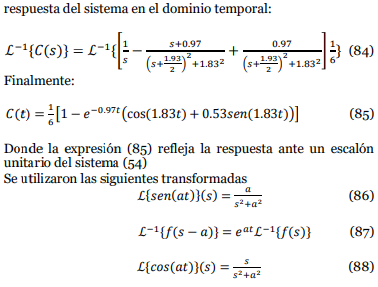



- Respuesta temporal con entrada escalón unitario

- Respuesta temporal con entrada rampa unitaria


En la figura 10 notamos claramente que para un factor de amortiguamiento entre 0 y 1 es subamortiguado y produce sobrepico además de oscilar y converger al valor de 1 esto puede variar dependiendo de la ganancia, pero claramente refleja el comportamiento con solo hallar sus polos y analizarlos.

- Parámetros del motor definidos en MatLab - “ParametrosDelMotorAprox.m”



b. Para Hsimp: De manera análoga realizamos el mismo procedimiento, el Script se mostró en la figura (12), los resultados se muestran en la figura (14), obviamente se corrobora lo obtenido anteriormente.

Análisis:


La expresión (126) refleja el comportamiento del sistema aproximado, excitado con un escalón unitario.










